Aug 12 2015
Deep in the basement of MIT’s Building 3, a two-legged robot named HERMES is wreaking controlled havoc: punching through drywall, smashing soda cans, kicking over trash buckets, and karate-chopping boards in half. Its actions, however, are not its own.
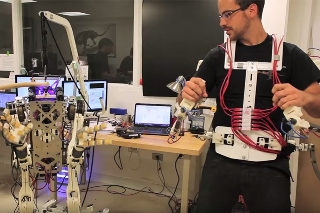 PhD student Joao Ramos demonstrates the Balance Feedback Interface, a system that enables an operator to control the balance and movements of a robot, through an exoskeleton and motorized platform
PhD student Joao Ramos demonstrates the Balance Feedback Interface, a system that enables an operator to control the balance and movements of a robot, through an exoskeleton and motorized platform
Just a few feet away, PhD student Joao Ramos stands on a platform, wearing an exoskeleton of wires and motors. Ramos’ every move is translated instantly to HERMES, much like a puppeteer controlling his marionette. As Ramos mimes punching through a wall, the robot does the same. When the robot’s fist hits the wall, Ramos feels a jolt at his waist. By reflex, he leans back against the jolt, causing the robot to rock back, effectively balancing the robot against the force of its punch.
Robot with human reflexes
The exercises are meant to demonstrate the robot’s unique balance-feedback interface. Without this interface, while the robot may successfully punch through a wall, it would also fall headlong into that wall. The interface allows a human to remotely feel the robot’s shifting weight, and quickly adjust the robot’s balance by shifting his own weight. As a result, the robot can carry out momentum-driven tasks — like punching through walls, or swinging a bat — while maintaining its balance.