I am currently finishing an NSF postdoctoral fellowship at the University of Utah. My recent research activities involve “resurrecting” ancient animals with computer simulations and biomimetic models to test unexplored hypotheses about the swimming capabilities and ecological roles of their once-living counterparts.
Through these approaches, I explore how animals and objects interact with the physics of their environments and how ancient biological experiments can inform current technologies.
Could you summarize the results of your recent research?
For my recent research, I have become interested in how animals have navigated stability-maneuverability tradeoffs throughout their evolutionary history and the ecological constraints they produce. These experiments involve reconstructing ancient animals and imparting models with the physical properties they would experience during life.
These experiments highlight inescapable physical tradeoffs and reinforce that there is no single optimum morphology. Instead, the tremendous morphological disparity preserved in the fossil record provided diverse functional opportunities to these living animals. These results help us better understand the functional complexity of ancient ecosystems and provide views into unique forms of underwater locomotion.

© David A Litman/ Shutterstock.com
What is an ammonite, and what relevance do they have in understanding ancient cephalopods?
Ammonoids are cephalopods, which are cousins to squid and octopuses, with external shells that functioned as buoyancy apparatuses. Their shells are ubiquitous in the fossil record, painting a remarkably complete picture of macroevolutionary patterns and morphological trends through time. The internal and external shape of these shells would have imposed harsh constraints on how the living animals navigated the physics of their surrounding environments.
The information they contain makes them excellent targets for studying the evolutionary biomechanics and paleoecology of cephalopods and aquatic animals more broadly.
Although there are many and often well-preserved fossils, it can be difficult to model how these animals once moved. Why is this, and why is it especially difficult for marine organisms?
There are many barriers to understanding the biomechanics of ancient life. The most difficult barriers involve the lack of ideal modern analogs and assumptions about soft parts that are rarely preserved.
It turns out ammonoids are great targets to study because they have modern analogs of varying performance metrics (ranging from squid to Chambered Nautilus). Also, their external shells preserve the shape of their air-filled chambers and the overall shape of their soft parts.
Marine organisms are difficult to study because their interactions with surrounding fluids can be chaotic and nuanced while also being dependent upon scale. Also, numerous physical properties influence movement in addition to their external shape. For example, they must balance the correct amount of liquid in their chambered shells to be neutrally buoyant (neither rising nor sinking).
Marine organisms must also balance the distribution of their center of mass to assume the proper orientation underwater with the proper amount of stability. These properties and others considerably complicate underwater movement and swimming performance.
What benefits can robotic technologies bring to evolutionary research, especially to fields that focus on morphology modeling?
Robotic techniques present new opportunities to further explore the fossil record, adding useful context to past and present studies concerning biology, ecology, evolution, and engineering. After all, the fossil record represents one of the largest datasets in existence.
As animals go extinct, so does critical information about their life habits, ecologies, and biomechanical properties. But now, thanks to emerging technologies, we can retrieve this lost information to study the past and inform on present environmental and engineering challenges.
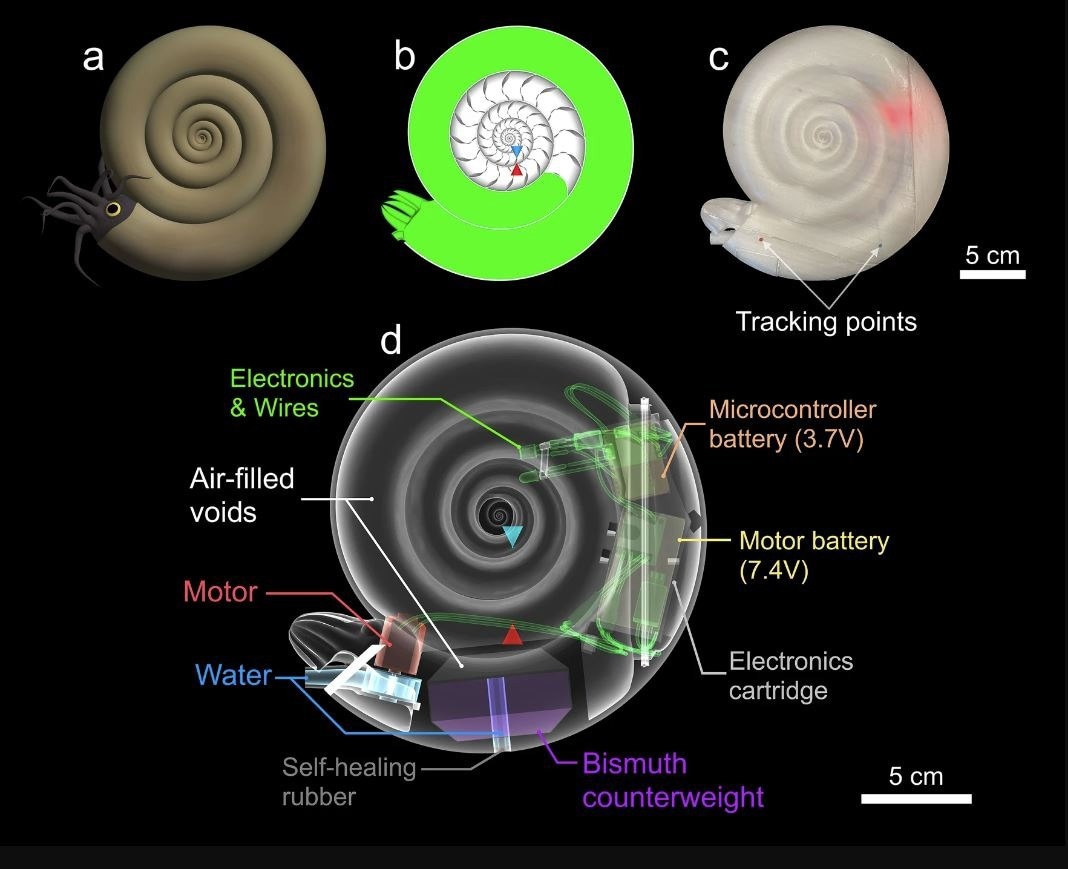
Biomimetic cephalopod robot design. (a) Hypothetical reconstruction of an ectocochleate cephalopod. (b) Virtual model used to determine the hydrostatic properties of this particular shape (c) Fully assembled 3D-printed robot with tracking points used in “3D motion tracking”. (d) Schematic of the assembled robot indicating each model component (color-coded by measured bulk density values). The tips of the blue and red cones denote the locations of the centers of buoyancy and mass, respectively. © D. J. Peterman., and K. A. Ritterbush (2022)
Could you break down the technical components of the robot cephalopod, and did you encounter any challenges in the design of this robot?
We wanted to explore questions that could only be answered with untethered models. That is, all electronic components were housed on board, allowing free movement in any direction. I designed an impeller-based water pump that could generate thrusts comparable to the modern Chambered Nautilus.
The robots also had to be water-tight to protect sensitive electronics and to maintain neutral buoyancy. This was rather challenging because the mass of every modeled component had to be balanced so that the robot floated neutrally in the water.
The largest challenge was compensating for materials that differ in density from the living animal. The differences in material properties and their 3D distributions were corrected with an internal counterweight, producing the proper orientation in the water.
How difficult would it be to use this approach for larger extinct organisms? Do you think that the integration of robotic technologies into biological modeling, especially for evolutionary research, will increase in the future?
These robotic technologies could definitely be used to study larger extinct organisms and are increasingly used to study ancient animals. Scale is important in biomechanics (especially for submerged objects), so relevant questions could be explored at the appropriate size.
The biggest limitation is actually studying small organisms because the electronics and manufactured parts can only be practically created at certain sizes. I expect we will see an increased use of these techniques in the near future as their value becomes further recognized.
What are the next steps for this research? Are there any future directions you are hoping to explore with this technology?
Our next step is to further study the interaction between hydrostatics, including buoyancy, orientation and stability as well as hydrodynamics. These properties are rarely explored together in biomechanical studies, yet they both impose severe constraints on swimming performance. This study will produce useful details regarding aquatic locomotion and the design of bioinspired human-made technologies (e.g., remotely operated underwater vehicles; ROUVs).
About David Peterman Ph.D.
 David Peterman Ph.D. is currently a National Science Foundation Postdoctoral Fellow working at the University of Utah. His research lies at the interface between functional morphology, paleobiology, and engineering.
David Peterman Ph.D. is currently a National Science Foundation Postdoctoral Fellow working at the University of Utah. His research lies at the interface between functional morphology, paleobiology, and engineering.
David studies diverse forms of aquatic locomotion in an evolutionary context by exploring the untapped information preserved in the fossil record. For his dissertation work, David developed new techniques to virtually reconstruct extinct animals and their biomechanical properties.
His postdoc research expands on this work by further “resurrecting” animals with biomimetic models and robotics. These approaches gather new insights from ancient life, informing on ecology, evolution, and bioinspired technologies.
Disclaimer: The views expressed here are those of the interviewee and do not necessarily represent the views of AZoM.com Limited (T/A) AZoNetwork, the owner and operator of this website. This disclaimer forms part of the Terms and Conditions of use of this website.