A project on precision finishing with the help of robots was completed by the Group Manager of Mechatronics, Yang, at A*STAR’s Singapore Institute of Manufacturing Technology (SIMTech).
During this project, Yang and his team used industrial robots to obtain chamfered edges and eliminate burrs in huge work pieces including aero-engine parts. These processes are usually performed manually by skilled laborers in most aerospace plants.
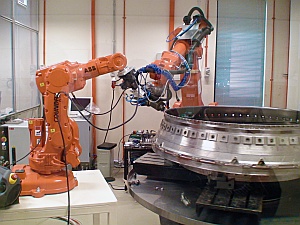 Robotic Finishing Tasks
Robotic Finishing Tasks
Yang stated that the manual method will consume a lot of time as it involves working on several minute features. He added that it is not possible to provide assurance of quality with the manual approach, especially in difficult working conditions in the factory. During the development of the robotic finishing equipment, it was difficult to regulate the contact force required for removal of materials, which complicated the process of automation Since operations such as deburring and chamfering are complicated, the important technologies of automation are robot programming and tool path planning .
Yang stated that industrial robots are built more for controlling velocity and position, not for controlling force. Yang and his coworkers put forth several technological innovations using computer-aided design models. Some of the technologies developed by Yang’s team include algorithms for tool path planning, robotic workcell calibration techniques, an in situ profile measurement system, and force-control-based material removal methods. With the use of these techniques, the serial processes of deburring and chamfering were conveniently performed. This edge profiling was performed with a precision of ±0.2 mm.