Dec 20 2016
Building a soft robot with the capacity to move organically - to twist like a wrist or bend like a finger - has always been a trial and error process. Recently, researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences and the Wyss Institute for Biologically Inspired Engineering have formulated a technique to automatically design soft actuators based on the preferred movement.
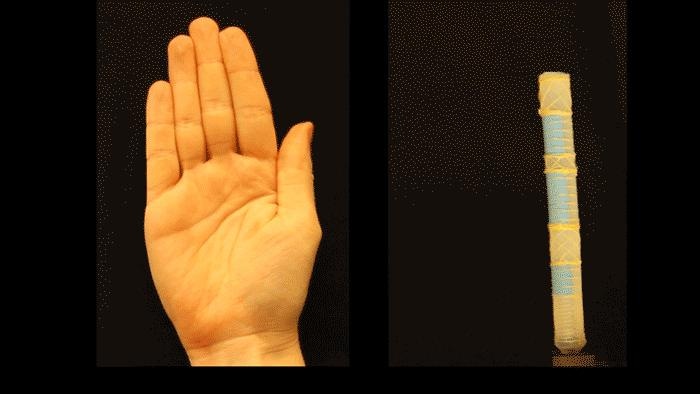 Harvard researchers used mathematical modeling to optimize the design of an actuator to perform biologically inspired motions. (Credit: Harvard SEAS)
Harvard researchers used mathematical modeling to optimize the design of an actuator to perform biologically inspired motions. (Credit: Harvard SEAS)
The study has been published in The Proceedings of the National Academy of Sciences.
Rather than designing these actuators empirically, we wanted a tool where you could plug in a motion and it would tell you how to design the actuator to achieve that motion.
Katia Bertoldi, the John L. Loeb Associate Professor of the Natural Sciences and coauthor of the paper
Making a soft robot to bend like a finger or knee may look simple but in reality the motion is highly complex.
The design is so complicated because one actuator type is not enough to produce complex motions. You need a sequence of actuator segments, each performing a different motion and you want to actuate them using a single input.
Fionnuala Connolly, a graduate student at SEAS and first author of the paper
The technique formulated by the team uses mathematical modeling of fluid-powered, fiber-reinforced actuators to boost the design of an actuator to carry out a certain motion. The team used this model to design a soft robot that bends in the same manner as an index finger and twists in the same manner as a thumb when powered by one pressure source.
This research streamlines the process of designing soft robots that can perform complex movements. It can be used to design a robot arm that moves along a certain path or a wearable robot that assists with motion of a limb.
Conor Walsh, the John L. Loeb Associate Professor of Engineering and Applied Sciences, Core Faculty Member at the Wyss Institute for Biologically Inspired Engineering and coauthor of the paper
The new methodology will be added into the Soft Robotic Toolkit, an online, open-source resource developed at SEAS to assist researchers, educators and up-and-coming innovators to design, fabricate, model, characterize, and manipulate their own soft robots.