Dec 7 2015
As part of the National Robotics Initiative (NRI), the National Institutes of Health announced that it will fund the development of three innovative co-robots—robots that work cooperatively with people. Two of the robots will improve health and quality of life for individuals with disabilities, and the third will serve as a social companion for children that inspires curiosity and teaches the importance of hard work and determination. Funding for the NIH projects will total approximately $2.2 million over the next five years, subject to the availability of funds.
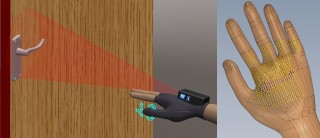 Assistive device uses computer vision and natural feedback mechanisms to help the visually impaired grasp objects. Credit: Cang Ye, University of Arkansas at Little Rock.
Assistive device uses computer vision and natural feedback mechanisms to help the visually impaired grasp objects. Credit: Cang Ye, University of Arkansas at Little Rock.
“When the general public thinks about the research that NIH supports, they don’t usually imagine robots. But robots have a tremendous potential to contribute to the health and well-being of our society, whether they are helping an elderly person engage in physical activity or promoting the curiosity of a child,” said Grace Peng, Ph.D., program director of Rehabilitation Engineering at the National Institute of Biomedical Imaging and Bioengineering, part of NIH. “These three highly innovative projects demonstrate the power of encouraging leaders in the field of robotics to focus their attention on solving issues that pertain to health.”
This is the fourth year the NIH has participated in the interagency NRI initiative. The National Science Foundation, the National Aeronautics and Space Administration, the U.S. Department of Agriculture, and the U.S. Department of Defense also supported the development of new co-robots this year.
Smart-walker to increase mobility for elderly
Xiangrong Shen, Ph.D.
University of Alabama, Tuscaloosa
As individuals age, their ability to walk without assistance diminishes, leading to a decrease in physical activity and quality of life. To stay in their homes, elderly with mobility issues often require costly home modifications such as replacing steps with ramps or installing wheelchair lifts. The goal of this project is to develop a four-legged robot that enhances mobility, so that the elderly can remain physically active and enjoy a healthier life with reduced reliance on the assistance of caregivers or expensive home renovations.
The robot has two modes: smart power-assist walker and smart mule. In the smart power-assist walker mode, the user is situated within the robot and chooses the amount of powered assistance that is needed. In the smart mule mode, the robot walks alongside the user while carrying a load, for example groceries. The robot uses a 3-D computer vision-based sensing system to detect the user’s motion and the environment. With its smart legs, the robot is able to easily overcome environmental obstacles in ways that powered wheelchairs cannot.
This project is funded jointly by the National Institute of Biomedical Imaging and Bioengineering, the National Institute of Nursing Research, and the Eunice Kennedy Shriver National Institute of Child Health & Human Development grant NR016151.
Hand-worn device to help visually impaired grasp objects
Cang Ye, Ph.D.
University of Arkansas at Little Rock
This project proposes to create a hand-worn assistive device that uses computer vision to identify target objects in a user’s environment, determine misalignment between the user’s hand and the object, and then convey—via natural human-device interfaces—the hand motion needed to grasp the object. The device will contribute to the independent lives of the visually impaired in two major ways: It will enhance the individual’s ability to travel independently by helping the user identify moveable obstacles and manipulate them so that they can pass, and it will assist in object grasping for non-navigational purposes such as identifying and correctly maneuvering a specific door handle.
This project is funded by the National Eye Institute grant EY026275.
A social-robot companion for kids
Cynthia Breazeal, Ph.D.
Massachusetts Institute of Technology, Cambridge
Curiosity, resilience to challenging environments, and a growth mindset—the belief that one’s basic abilities can be improved through dedication and hard work—are important factors that influence a child’s mental health, academic achievement, and general well-being. The goal of this project is to create an autonomous, long-term social robotic companion for children that will promote and assess curiosity and a growth mindset through various interactions. After developing the robot, the researchers plan to evaluate its influence by conducting a six-month longitudinal study in which children learn and play while interacting with the robot companion.
This project is funded by the Eunice Kennedy Shriver National Institute of Child Health & Human Development grant HD086899.