Oct 26 2015
Researchers have developed a robot that adjusts its movements in order to avoid colliding with the people and objects around it. This provides new opportunities for more friendly interaction between people and machines.
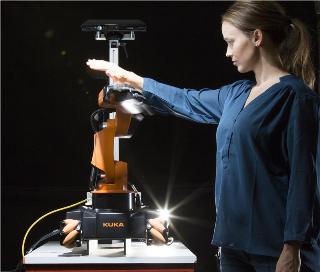 Researcher Marianne Bakken attempting to get close and personal with an orange robot arm – moving in all directions to try to get the robot to collide with her. But it manages to avoid her every time.Photo: Werner Juvik/SINTEF.
Researcher Marianne Bakken attempting to get close and personal with an orange robot arm – moving in all directions to try to get the robot to collide with her. But it manages to avoid her every time.Photo: Werner Juvik/SINTEF.
Modern industrial robots commonly weigh in at several tonnes and for this reason are placed inside netting enclosures to prevent them colliding with, and causing damage to, the people and objects around them. The drawback is that they are static and perform repetitive tasks entirely separated from their fellow human operators on the same production line.
Working with a machine
If we could forget having to watch out for robot arms colliding with the people and objects around them, their applications could be expanded – with important implications for industrial production.
SINTEF researcher Marianne Bakken tells Gemini about a new ‘hot’ European field of research called ‘collaborative robots’. These machines are equipped with light-duty arms that can more easily be integrated into existing production systems.
"These robots are a few kilos lighter than previous models. They're safer to work with and shut down gently if they come into contact with a foreign object", says Bakken. "Today, however, robot arms of this type are blind. To avoid constant collisions, they need to be more intelligent. And this is where we enter the stage. By installing a sensor on the robot, we create a safe machine that can 'see'. Perhaps this will enable them to work alongside people, instead of being shut away in cages", she says.
No thinking twice
"It all started with a general requirement to build faster reaction times into robot arm mechanisms", says Bakken. "Our starting point was to try to help the robot 'see' the objects around it", she says.
This evolved into a four-year, strategic, SINTEF ICT project called SEAMLESS.
The researchers obtained funding to investigate the potential of installing a 3D sensor on a robot.
"The sensor detects objects in the space around it, and senses where any given object is located in relation to the robot arm", says Bakken.
A robot relies on being continuously fed with data so that it can decide in which directions it should be moving. In this case, the sensor generates data that are sent to a PC, where the data are processed and information relayed to the robot arm. The SINTEF researchers have succeeded in speeding up the necessary calculations.
"We've managed to obtain updates of the robot's movements at a rate of ten times a second", says Bakken.
Previously, the movement update calculation took many seconds, by which time the robot might already have collided with something. But now the robot doesn't need to stop and think twice before it makes its next move.
"By combining fast sensor technology with smart algorithms, we can achieve a uniform and seamless manoeuvre", says Bakken.
The way ahead
SINTEF's research centre in Oslo has attracted a lot of attention from the outside world with the videos of the robot it has made and posted online. The researchers have developed a universal system that they now want to apply in a number of future projects. At the moment they're working on selling the concept to the industrial sector.
"It's also possible to move the pedestal on which the robot stands. This allows the robot to move with greater autonomy", says Bakken. "In the future we can envisage robots that move around the workplace carrying out tasks without colliding with people or the objects around them", she says.