Mar 29 2013
Scientists have successfully replicated the behaviour of a colony of ants on the move with the use of miniature robots, as reported in the journal PLOS Computational Biology. The researchers, based at the New Jersey Institute of Technology (Newark, USA) and at the Research Centre on Animal Cognition (Toulouse, France), aimed to discover how individual ants, when part of a moving colony, orient themselves in the labyrinthine pathways that stretch from their nest to various food sources.
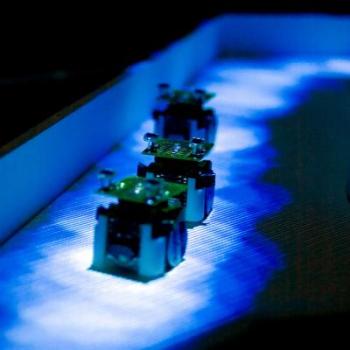 This image shows the robot ants (Alices) pursuing a light trail around the constructed maze. Credit: Simon Garnier: Garnier S, Combe M, Jost C, Theraulaz G (2013) Do Ants Need to Estimate the Geometrical Properties of Trail Bifurcations to Find an Efficient Route? A Swarm Robotics Test Bed. PLOS Comput Biol 9(3): e1002903. doi:10.1371/journal.pcbi.1002903.
This image shows the robot ants (Alices) pursuing a light trail around the constructed maze. Credit: Simon Garnier: Garnier S, Combe M, Jost C, Theraulaz G (2013) Do Ants Need to Estimate the Geometrical Properties of Trail Bifurcations to Find an Efficient Route? A Swarm Robotics Test Bed. PLOS Comput Biol 9(3): e1002903. doi:10.1371/journal.pcbi.1002903.
The study focused mainly on how Argentine ants behave and coordinate themselves in both symmetrical and asymmetrical pathways. In nature, ants do this by leaving chemical pheromone trails. This was reproduced by a swarm of sugar cube size robots, called "Alices", leaving light trails that they can detect with two light sensors mimicking the role of the ants' antennae.
In the beginning of the experiment, where branches of the maze had no light trail, the robots adopted an "exploratory behaviour" modelled on the regular insect movement pattern of moving randomly but in the same general direction. This led the robots to choose the path that deviated least from their trajectory at each bifurcation of the network. If the robots detected a light trail, they would turn to follow that path.
One outcome of the robotic model was the discovery that the robots did not need to be programmed to identify and compute the geometry of the network bifurcations. They managed to navigate the maze using only the pheromone light trail and the programmed directional random walk, which directed them to the more direct route between their starting area and a target area on the periphery of the maze. Individual Argentine ants have poor eyesight and move too quickly to make a calculated decision about their direction. Therefore the fact that the robots managed to orient themselves in the maze in a similar fashion than the one observed in real ants suggests that a complex cognitive process is not necessary for colonies of ants to navigate efficiently in their complex network of foraging trails.
"This research suggests that efficient navigation and foraging can be achieved with minimal cognitive abilities in ants," says lead author Simon Garnier. "It also shows that the geometry of transport networks plays a critical role in the flow of information and material in ant as well as in human societies."