Researchers from Oakland University and Guizhou, China, have presented an exciting study in Green Energy and Intelligent Transportation, exploring the latest advancements in deep reinforcement learning (DRL) for coordinating highway lane changes, ramp merges, and vehicle platoons.
 A review on reinforcement learning-based highway autonomous vehicle control. Image Credit: GREEN ENERGY AND INTELLIGENT TRANSPORTATION
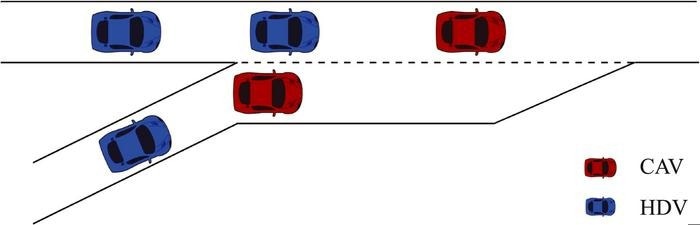
A review on reinforcement learning-based highway autonomous vehicle control. Image Credit: GREEN ENERGY AND INTELLIGENT TRANSPORTATION
Autonomous vehicles (AVs) are set to transform the transportation sector by enhancing safety, efficiency, and accessibility, all while improving comfort for users. However, developing effective control systems that can manage the complex demands of real-world driving presents a significant challenge.
AV technology offers a range of potential benefits, including reducing accidents, easing congestion, lowering fuel consumption, cutting emissions, and optimizing the use of parking spaces. At the same time, it may introduce new challenges, such as increasing traffic volumes, disrupting industries like transit and insurance, and raising ethical and legal questions.
Control methods for AVs are highly sensitive to specific driving environments. Three major areas of focus for AV control include highway lane changes, ramp merging, and platoon coordination. The diversity of conditions in these areas underscores the complexity of the lane change problem and the need for adaptable solutions.
Over the past decade, significant strides have been made in control algorithms, enabling systems to achieve impressive results in various fields, including transportation. This review synthesizes key developments from recent research, highlighting both single-vehicle control and more complex scenarios involving multiple vehicles.
The review also identifies important trends in training methodologies, simulations, and performance metrics. It outlines current limitations in AV control systems and offers practical recommendations to guide future research. By addressing these challenges, the industry can move closer to realizing the full potential of AV technology to navigate intricate traffic conditions.
The insights from this study provide a clear direction for future research, emphasizing areas such as improving vehicle-to-vehicle coordination, testing under diverse traffic conditions, and refining human driver models to better capture complex interactions on the road.
Journal Reference:
Irshayyid, A. et. al. (2024) A review on reinforcement learning-based highway autonomous vehicle control. Green Energy and Intelligent Transportation. doi.org/10.1016/j.geits.2024.100156