Researchers from the Singapore University of Technology and Design (SUTD) used Machine Learning to develop a new technique for modeling the dynamics of underwater stingray-like robots.
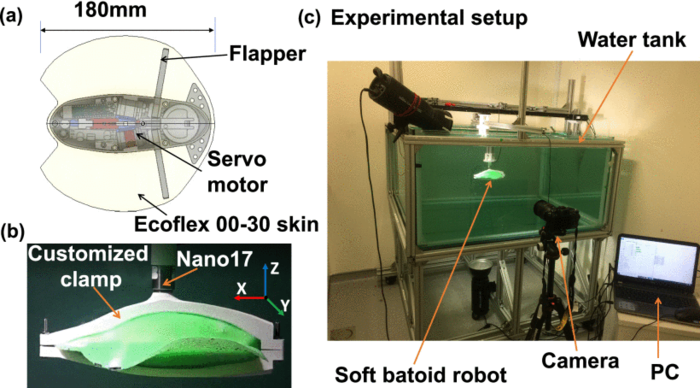 (a) CAD model (top view) displaying robot internal components. (b) Side view showing the robot mounted to the 6-axis load cell. (c) Instrumented tank used for force measurements. Image Credit: SUTD.
(a) CAD model (top view) displaying robot internal components. (b) Side view showing the robot mounted to the 6-axis load cell. (c) Instrumented tank used for force measurements. Image Credit: SUTD.
By properly anticipating the required flapping movements for a set of given propulsive force targets, this technique can enable more efficient swimming in complex underwater situations.
Their paper will pave the way for greater control of autonomous underwater robots. The paper was published in IEEE-RAL.
The graceful, natural movements of bio-inspired soft robots set them apart. Nevertheless, due to their unlimited degrees of freedom and complex dynamics, modeling and controlling soft robot bodies underwater is difficult.
The study team concentrated on creating a Deep Neural Network (DNN) model that could predict desirable flapping motions to perform the requisite locomotion in a fast-changing environment. DNN models, in contrast to traditional physics-based models, can provide minimal input-output correlations for the complicated dynamics seen in soft bodies.
The team was certain that DNN would be better suited to anticipate and precisely imitate the complicated physical features of soft underwater robots after comparing the measured propulsive forces created during the DNN model’s projected flapping sequence to the DNN model’s target forces.
The studies were conducted inside a water tank with the robot attached to a custom-designed 3D printed clamp with a 6-axis load cell. The forces and torques generated during the flapping of the robot’s fins were measured using the sensor attached to the clamp.
The robot was subjected to various input signals, and the resulting pressures and torques revealed minimum input-output relationships for the complicated dynamics inherent in soft-bodied robotics. In total, ten experiments were carried out to obtain 100 sets of Force/Torque data from 100 different robot input sequences.
The new technique made the normally time-consuming modeling procedure easier and provided solid predictions that could be used to train underwater robots’ flapping sequences to induce desired propulsive forces.
Our research team will continue to explore trained DNN models using integrated sensors and autonomous behaviour control of robots in dynamic underwater environments for marine inspection and exploration.
Pablo Valdivia y Alvarado, Principal Investigator and Assistant Professor, Singapore University of Technology and Design
Journal Reference:
Li, G., et al. (2022) DNN-Based Predictive Model for a Batoid-Inspired Soft Robot IEEE-RAL doi:10.1109/LRA.2021.3135573.