Reviewed by Alex SmithMay 4 2022
Soft, pneumatic actuators are not a term people hear every day, but chances are that people could have utilized them at some point in their lives. The devices employ compressed air to power motion, and they have proven to be a vital backbone in a range of applications, including assistive wearables, robotics and rehabilitative technologies, thanks to their sensing capabilities.
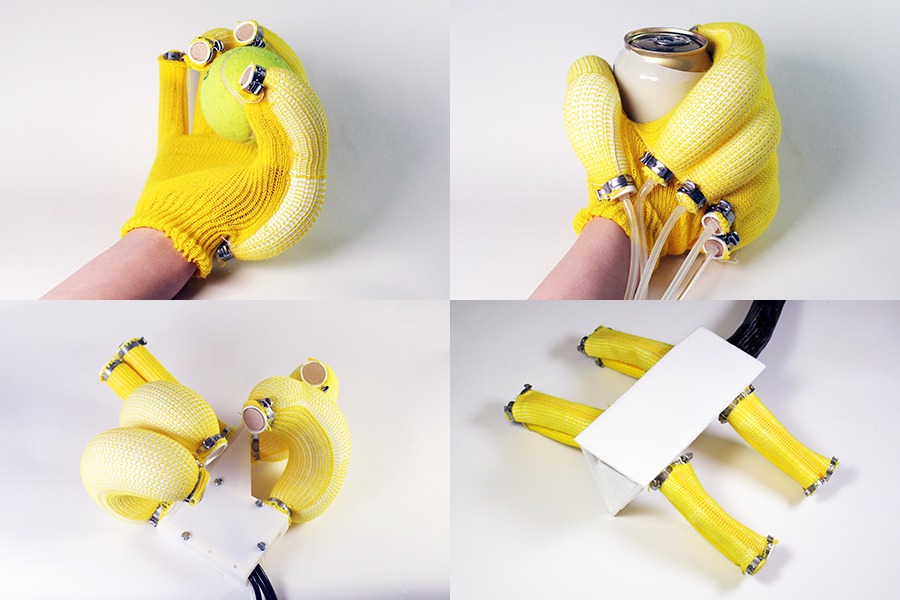
Image Credit: MIT Computer Science and Artificial Intelligence Laboratory
However, there is a barrier to the development of small dynamic devices with advantages such as high response speeds and power to input ratios. They necessitate a manual design and fabrication process, which entails numerous trial and error cycles to determine whether the designs will function or not.
The Computer Science and Artificial Intelligence Laboratory (CSAIL) at MIT developed “PneuAct,” a scalable pipeline for computationally designing and digitally fabricating soft pneumatic actuators.
PneuAct employs a machine knitting method similar to that of a grandmother’s plastic needle used for knitting — however, this machine is self-contained. To program how the actuator will move, a human designer simply determines the stitch and sensor design patterns in software, which can be simulated before printing. The knitting machine creates the textile piece, which may then be attached to a cheap, off-the-shelf rubber silicone tube to finalize the actuator.
The knitted actuator uses conductive yarn to sense what it touches, enabling it to “feel” what it touches. An assistive glove, a soft hand, an interactive robot and a pneumatic walking quadruped were among the concepts created by the team. Their prototypes included an assistance glove, a soft hand, an interactive robot, and a pneumatic quadrupedal robot, all of which used yellow fabric to resemble banana fingers.
While there has been a lot of progress in the hardware development of soft pneumatic actuators in recent years — a 2019 prototype of a collaborative robot employed such actuators to replicate human-like clutching in its hands — the design tools have not kept up. The researchers used a mix of elastic and sensor stitches (with conductive yarn) for programming the actuators’ bending while they are inflated, as well as the ability to include real-world feedback.
The actuators, for instance, were utilized to create a robot that could detect when it was contacted by human hands and react accordingly.
A human can use the team’s glove to supplement finger muscle action and reduce the amount of muscle activity required to execute activities and motions. This has a lot of potential for people who have finger injuries, limited mobility, or other damage.
The approach can also be used to produce an exoskeleton (wearable robotic units operated by a computer that augment human motion and restore mobility and movement), for instance, the authors developed a sleeve that allows users to bend their elbows, knees, or other body parts.
Using digital machine knitting, which is a very common manufacturing method in today’s textile industry, enables ‘printing’ a design in one go, which makes it much more scalable. Soft pneumatic actuators are intrinsically compliant and flexible, and combined with intelligent materials, have become the backbone of many robots and assistive technologies - and rapid fabrication with our design tool can hopefully increase ease and ubiquity.
Yiyue Luo, Ph.D Student and Study Lead Author, MIT Computer Science and Artificial Intelligence Laboratory
Making Sense of Sensors
“Resistive pressure sensing,” in which the actuator “sends” pressure, was one sort of sensing the researchers used. When constructing a robotic gripper, for instance, the pressure sensor will detect how much force is being exerted to the object and then attempt to determine if the grasp is effective or not. The other type is “capacitive sensing,” in which the sensor extracts data from the materials that the actuator is in contact with.
While the actuator is robust—no yarns broke in any of their tests—one restriction of the device is that they were confined to tube-shaped actuators since they are inexpensive and easy to get. To prevent being confined by that single structure, the next natural step is to investigate actuators of various shapes.
Another enhancement the researchers will look at is including a task-driven, optimization-based design, in which users can select target positions and optimal stitch patterns that can be synthesized autonomously.
Our software tool is fast and easy-to-use and accurately previews users’ designs, allowing them to quickly iterate virtually while only needing to fabricate once. However, this process still requires some trial-and-error from humans. Can a computer reason about how textiles should be physically programmed in actuators to allow for rich, sensing-driven behavior? That’s the next frontier.
Andrew Spielberg, Study Author and Postdoctoral Fellow, Materials Science and Mechanical Engineering, Harvard University
Journal Reference:
Luo, Y., et al. (2022) Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting. CHI '22: CHI Conference on Human Factors in Computing Systems. doi.org/10.1145/3491102.3517577.