Malleable robots are a class of reconfigurable robots that can supplement certain applications in a variety of fields, including spacecraft maintenance, manufacturing and even injury rehabilitation.
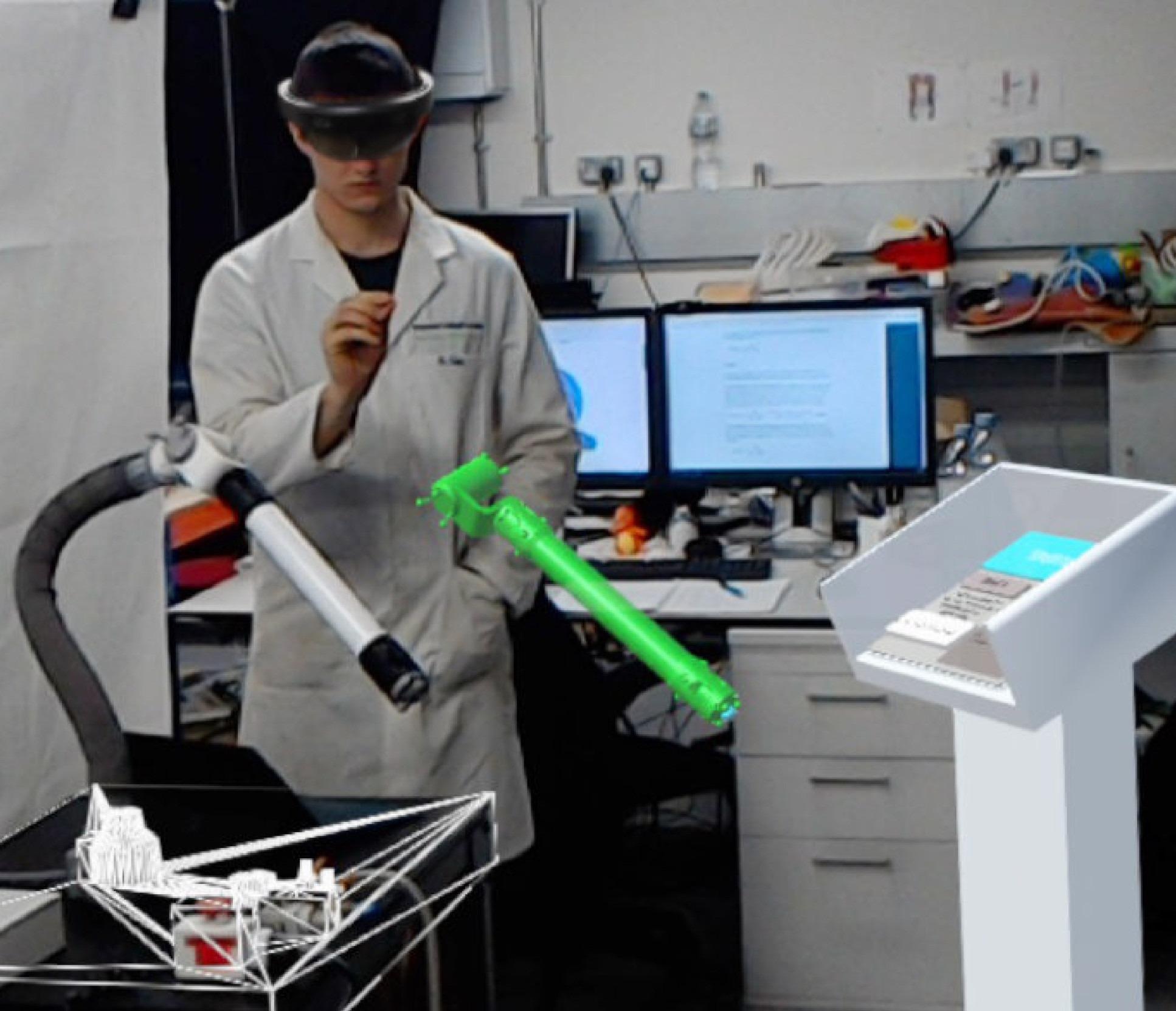
Image Credit: Imperial College London
Now, a team of researchers at Imperial College London has developed a malleable robotic arm that can be manipulated with the assistance of Augmented Reality (AR) goggles.
The bendy robotic arm can be twisted and turned in all manner of directions, making it customizable and free from the restraints that conventional rigid robotics are faced with.
When in use, those working with the robotic arm are able to bend the arm into a position that meets the task or application requirements using AR goggles that help the user see how to configure the robot.
Until now, bending a malleable, configurable robotic arm into position without guidance has presented a series of challenges, including accurate positioning and guidance.
However, the team’s novel technique requires the user to wear smart glasses, which present a mixed reality display through motion-tracking cameras that present templates and designs that are mapped onto the surrounding physical environment.
User-Friendly
The team from Imperial College London wanted to make sure the robotic arm was user-friendly in order to remove the potential barriers to application use.
One of the key issues in adjusting these robots is accuracy in their new position. We humans aren’t great at making sure the new position matches the template, which is why we looked to AR for help.
Dr. Nicolas Rojas, Dyson School of Design Engineering, Imperial College London
Users are guided by the superimposed templates which are projected for the specific task at hand. When the arm is aligned with the template, the AR system turns green for the user to see the successful configuration has been achieved, and the arm can be locked into position.
We’ve shown that AR can simplify working alongside our malleable robot. The approach gives users a range of easy-to-create robot positions, for all sorts of applications, without needing so much technical expertise.
Dr. Nicolas Rojas, Dyson School of Design Engineering, Imperial College London
Rojas and his colleagues tested their system on five different candidates aged between 20-26 with limited experience in robotics and none in malleable robotic systems. Each user was able to successfully align the robotic arm according to the AR template.
The results of this study have recently been published in IEEE Robotics & Automation Magazine.
Due to the malleable robotic arm being constructed of layers of mylar sheets, making it extremely lightweight, it has great potential for application in aeronautics, spacecraft maintenance and injury rehabilitation.
In many ways it can be seen as a detached, bendier, third arm. It could help in many situations where an extra limb might come in handy and help to spread the workload.
Alex Ranne and Angus Clark, Co-Authors of the Study and Ph.D. Researchers, the Department of Computing and Dyson School of Design Engineering
Improving Augmented Technology
The application of augmented reality (AR), which is an enhanced perspective of the ‘real’ physical world, is brought about using digital visual elements or other sensory stimuli such as sound via specialized technology, for example, AR goggles and headsets.
In today’s world, AR is a rapidly emerging technology across several industries with a wide range of applications.
While the initial research was limited, the research team feels that the AR supplement allows malleable robots to be manipulated and, if used appropriately, offers a better chance of success in the given application.
Unlike virtual reality, which generates its own specific cyber environment, augmented reality adds layers to the existing physical world.
However, the robotic system still requires some fine-tuning, including strengthening of the component arm to meet demanding tasks in harsher environments. Improving the overall strength of the malleable arm would also enhance precision and accuracy as the arm would be less likely to lose its operating position when locked in place.
The researchers are also perfecting the AR component by introducing touch and audio elements into the AR system to improve accuracy when configuring the bendy robot, which could broaden the scope for application.
References and Further Reading
Brogan, C., (2022) Bendy robotic arm twisted into shape with help of augmented reality | Imperial News | Imperial College London. [online] Imperial News. Available at: https://www.imperial.ac.uk/news/234362/bendy-robotic-twisted-into-shape-with/
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.