Austrian researchers have developed a 3D extrusion printing process that uses biodegradable ink while modeling complex, dimensionally stable objects. The bio-ink is formed from a gelatin-based hydrogel that stretches six times its original length.
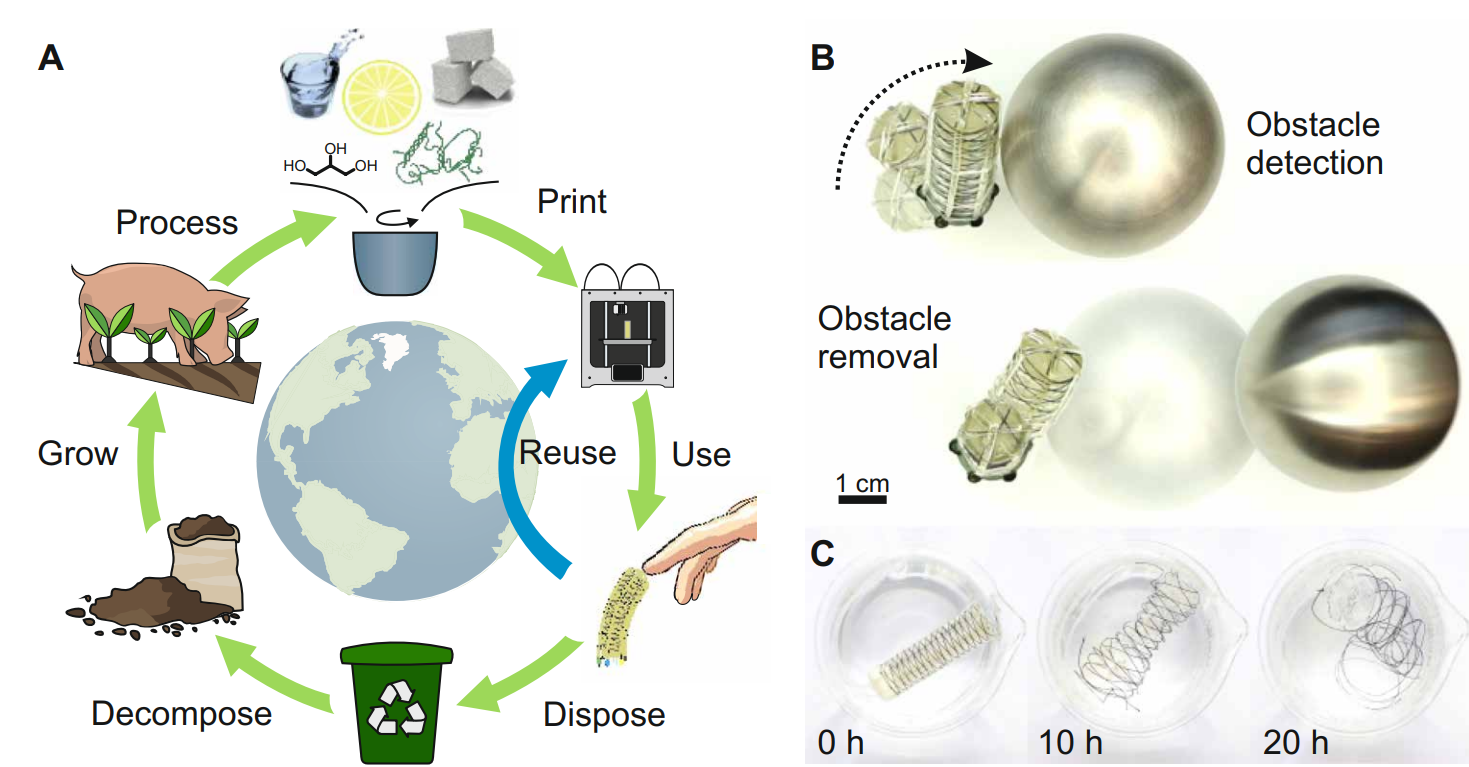 Image Credit: Heiden, A., et al., (2022) 3D printing of resilient biogels for omnidirectional and exteroceptive soft actuators. Science Robotics, [online] Vol. 7, No. 63. Available at: https://www.science.org/doi/10.1126/scirobotics.abk211
Image Credit: Heiden, A., et al., (2022) 3D printing of resilient biogels for omnidirectional and exteroceptive soft actuators. Science Robotics, [online] Vol. 7, No. 63. Available at: https://www.science.org/doi/10.1126/scirobotics.abk211
This promises novel applications for soft robotics while opening the door to zero-waste manufacturing.
Soft robotics engineers take their inspiration from nature when designing robotic appliances that interact with humans and other living organisms. However, the manufacturing process for these appliances often results in non-recyclable waste.
Moreover, traditional manufacturing methods such as mold casting do not fulfill the requirements of complex soft robotics applications. Therefore, advances in soft robotics require novel manufacturing methods while also advancing environmental sustainability.
Benefits and Challenges of Soft Robotics
Soft robots differ from the rigid robots found in industrial manufacturing environments. Relying on mimicry of nature, soft robots made from soft, adaptive materials are helping humans meet complex challenges in industry, healthcare and society.
However, soft robotics applications which use sensors and actuators, leave a heavy environmental footprint. Within this context, soft robotics actuators manufactured from biodegradable materials are desirable.
Attempts have been made to manufacture biodegradable soft robotic components using hydrogels, polyesters and proteins. However, conventional mold casting techniques limit the degree of freedom achievable with current soft robots.
Therefore, complex robotics applications that integrate flexible sensors require novel manufacturing approaches such as 3D extrusion printing.
Printing Biodegradable Robots
The Johannes Kepler University Linz team in Austria developed a 3D printing method for producing soft robotics actuators with integrated sensor networks.
Their method is based on Fused Deposition Modeling (FDM), where a continuous filament of biogel material is fed through a heated extruder head to form the desired object. The minimum feature size achievable is 0.6 mm.
Soft and stretchable materials are needed to engineer soft actuators for robotics. Biopolymers such as cellulose, alginate and gelatin have been used to produce biodegradable materials for engineering applications.
The Austrian team developed a highly stretchable (500% ultimate strain) and tunable (0.3 to 3 MPa modulus) gelatin-based hydrogel (biogel) for their study.
Gelatin is a hydrolyzed form of collagen commonly used in food products. It is a flavorless and colorless polymer derived from animal body parts. Thanks to its versatility, it is used in a wide range of engineering applications, including tissue engineering and fiber optics.
The material properties achieved by the Austrian team were the result of introducing glycerol and sugar syrup into the gelatin. Additionally, citric acid regulated bacterial growth. This ideal composition enables enzymatic degradation of the material in sewage - in just a few days - while also conferring a shelf life of more than a year in ambient conditions.
The biogel can be used to produce soft pneumatic actuators with bending angles up to 74° in any direction. Furthermore, the biogel can be reused up to five times for printing.
The team studied the effects of heating, storing and reusing the biogels. They noticed a drop to 470% in the ultimate strain of the material after 24 hours, outperforming mold cast manufactured biogels by 140%.
Their biogel retains above 430% ultimate strain after 12 days of storage in ambient conditions, which is well above the 200% required for soft robotics applications.
The Austrian researchers also printed waveguides using the biogel that sense deformations through the loss of transmitted light. They could adjust the refractive index of their waveguides by tuning the biogel’s water content.
Lastly, they printed a three-chamber actuator (60 mm in height and 16.6 mm in diameter). Three electro-pneumatic pressure regulators, a single-pressure source and a parallel arrangement of inflatable cavities enabled omnidirectional movement.
By recreating a two-dimensional map of actuation states and corresponding pressure values, they could control the robot using a standard video game controller.
The team showcased the robot’s capability by programming a search-and-wipe routine so that it could detect and remove obstacles.
By combining stretchable waveguides with soft actuators, the Austrian team could control curvature, direction and force sensing with high precision while also reducing manufacturing costs and waste.
References and Further Reading
Heiden, A., et al., (2022) 3D printing of resilient biogels for omnidirectional and exteroceptive soft actuators. Science Robotics, [online] Vol. 7, No. 63. Available at: https://www.science.org/doi/epdf/10.1126/scirobotics.abk2119
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.