 Image Credit: ESA
Image Credit: ESA
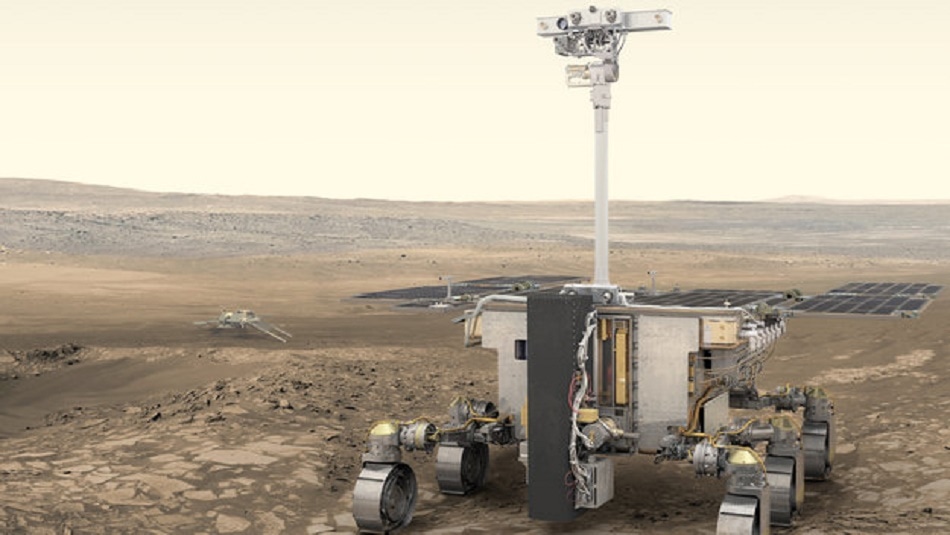
The Rosalind Franklin Mars rover is on a mission to Mars to hunt for extraterrestrial life. The rover has just been fitted with its full suite of alien-hunting equipment, including a state-of-the-art camera, 2 m boring drill and spectrometers.
A joint venture between the ESA (European Space Agency) and Russia’s Roscosmos, the ExoMars mission hopes to gain valuable data from the surface of the Red Planet to ascertain whether it was once home to living beings. The scheduled launch date is between July 26 and August 13, 2020 and the craft will hopefully touchdown in March of 2021. NASA is also launching a similar mission and their craft is due to land in February 2021, one month prior to ExoMars’ arrival.
The ExoMars Rover is the second phase of this joint ESA-Russian endeavour. The ExoMars Trace Gas Orbiter arrived at its destination in October 2016, and we received the first results from its observations in April 2019.
Our instruments are performing extremely well and even within the first few months of observation were already providing exquisite data to a much higher level than previously achieved.
Håkan Svedhem, TGO project scientist, ESA
Now, all eyes are set on the rover to provide surface-level insight to the Martian planet.
It has been named the Rosalind Franklin Mars rover, after London-born scientist Dr. Rosalind Franklin. Dr. Franklin was a physicist, biologist, chemist and X-Ray crystallographer, whose work was instrumental furthering our understanding of the building blocks of life.
ExoMars Rover: from concept to reality
The rover has just been fitted out with instruments at the Airbus Defence and Space facility in Hertfordshire, England. It boasts an impressive array of sensors and a drill capable of retrieving samples up to 2m below the dusty planet’s surface. One of the most impressive pieces of tech aboard the rover is ‘PanCam’ – a state-of-the-art camera mounted on a mast which rises 2m above the ground. PanCam utilizes stereo and high-resolution imaging to give detailed views of the surface, and can scope out any interesting geological structures in the near-infrared and visible wavelengths. It will be able to create 3D maps for navigation and exploration, guiding the un-manned craft over the surface.
PanCam will work alongside the on-board drill and neutron, infrared and multiwave spectrometers to gather a range of valuable samples and analyse them on-board, and emphasis will be placed on finding biosignatures, like amino acids.
The ExoMars Drill Unit is a sophisticated feat of engineering, capable of penetrating the different types of soil envisaged on Mars with great precision, and includes a dedicated positioning system to aid the rover’s navigation. It comes with an emergency jettison device in case the drill component becomes stuck, which could negatively impact the rover’s mobility and the continuation of the mission.
Just in case that wasn’t enough tech; a second camera – named Clupi - located on the bottom of the drill unit will provide close-up images of the soil that is churned up by the drilling operation. The rover has also been fitted with a subsurface sounding radar and neutron detector to search for signs of ice or water beneath the soil.
Our rover has really taken shape. We have an incredibly powerful scientific payload to explore the surface and subsurface of Mars on our quest to find biosignatures.
Jorge Vago, ExoMars project scientist, ESA
The landing platform, named Kazachok, has been built by Roscosmos and will hopefully guide the rover safely onto the Martian surface. Whilst there, the stationary platform will study the atmosphere and climate, look for evidence of water in its surroundings and measure radiation levels.
The team are now on the home stretch, determining suitable parachutes for the landing and putting the rover through final environmental checks to confirm that it is indeed ready for Mars.
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.