Oct 26 2016
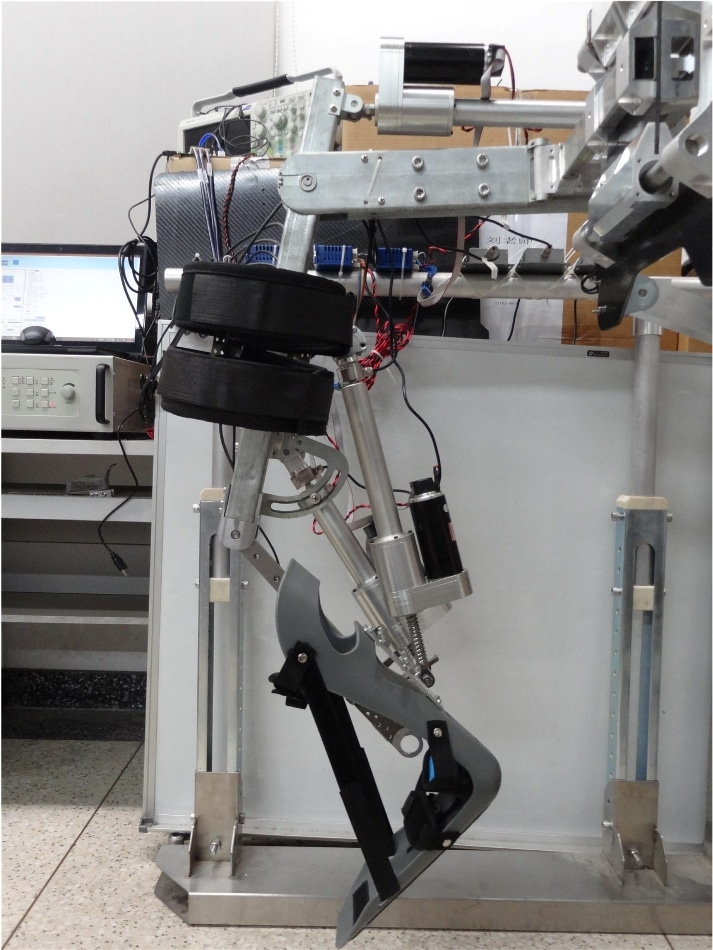 A prototype of the lower-limb exoskeleton being developed at Beihang University in Beijing, China. (Credit: Beihang University)
A prototype of the lower-limb exoskeleton being developed at Beihang University in Beijing, China. (Credit: Beihang University)
Gait rehabilitation is frequently required by spinal cord injury and stroke patients to help them regain their ability to walk or to strengthen their muscles. Wearable “robot-assisted training” is fast emerging as a technique that helps to enhance this rehabilitation process.
A team of researchers from Beihang University in China and Aalborg University in Denmark have achieved a major advancement in this area. They have designed a lower-limb robot exoskeleton, a wearable robot, which has natural knee movement to significantly improve the comfort and willingness of patients to wear it for gait rehabilitation.
The team reports their creation in this week’s issue of Review of Scientific Instruments, from AIP Publishing. They explain that their robotic exoskeleton is meant to help stroke patients strengthen their physical fitness, assist the rehabilitation training of paralyzed patients, or to help those who need assistance in performing everyday activities.
Exoskeleton robots are not a new concept. They have been analyzed in great detail and a number of designs have focused on lower limbs. This team's method focused on the knee joint, a highly complex mechanical systems within the human body and a key player during gait.
The knee joint’s motion is triggered by numerous skeletal muscles along its articular surfaces, and its center of rotation moves. The researchers speculated whether a parallel mechanism comparable to skeletal muscles would be useful for producing a bionic knee joint.
Our new design features a parallel knee joint to improve the bio-imitability and adaptability of the exoskeleton.
Weihai Chen, Professor, Beihang University
Specifically, the exoskeleton built by the team taps a hybrid serial-parallel kinematic structure comprising of a one-degree of freedom (DOF) hip joint module and a two-DOF knee joint module in the sagittal plane. Also, a planar two-DOF parallel mechanism helps to completely accommodate the motion of the human knee - enabling rotation and relative sliding.
Movement transparency is important when wearing a robot for gait rehabilitation. Simply put, when the exoskeleton is used, its movement should be consistent and synchronized with the natural movement of a patient.
“If not, it exerts extra forces on the human joint,” Chen said. “And this extra force causes patient discomfort and unnatural movements.”
So the team chose to focus on bionic mechanical design to realize this goal.
To improve the transparency of the robot, we studied the structure of the human body, then built our model based on a biometric design of the lower limb exoskeleton.
Weihai Chen, Professor, Beihang University
This design is the first ever use of a parallel mechanism at the knee joint to replicate skeletal muscles. “Our design goes beyond solving the transparency problem in the knee joint -- and it’s a simple structure,” Chen added. “Unlike most previous exoskeletons, which simplified the knee joint as a pin joint, ours provides 2 DOF to make the exoskeleton’s movement consistent with a patient’s natural movement.”
As far as its applications, the main role of the exoskeleton will be to assist spinal cord injury or stroke patients with their rehabilitation.
“We plan to streamline it to be wearable and to provide a comfortable training experience,” Chen said. “Our team is also developing virtual reality games to help make the training process more enjoyable.”
The team is investigating control of their exoskeleton via patients’ electromyography (EMG) signal - which captures electrical activity generated by skeletal muscles - so that they will be more readily involved in their training.
We can obtain the movement intention from a patient’s electroencephalogram (EEG) -- brain signals -- and use it to directly control the exoskeleton. These improvements should enable easy control and make the exoskeleton act as part of the human body.
Weihai Chen, Professor, Beihang University
The subsequent step for the research team is to team up with hospitals, because trying the robot out with patients can provide vital feedback from doctors and patients.
“We’d also like to commercialize it in the near future, so we’ll be working to make the robot’s appearance fancier and enhancing the user interface to be more user friendly,” Chen noted.