Nov 5 2013
Two EPFL spin-offs, senseFly and Pix4D (IC), have modeled the Matterhorn in 3D, at a level of detail never before achieved. It took senseFly’s ultralight drones just six hours to snap the high altitude photographs that were needed to build the model.
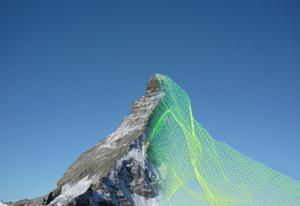 Photomontage: Jamani Caillet / © EPFL
Photomontage: Jamani Caillet / © EPFL
They weigh less than a kilo each, but they’re as agile as eagles in the high mountain air. These “ebees” flying robots developed by senseFly, a spin-off of EPFL’s Intelligent Systems Laboratory (LIS), took off in September to photograph the Matterhorn from every conceivable angle. The drones are completely autonomous, requiring nothing more than a computer-conceived flight plan before being launched by hand into the air to complete their mission.
Three of them were launched from a 3,000m “base camp,” and the fourth made the final assault from the summit of the stereotypical Swiss landmark, at 4,478m above sea level. In their six-hour flights, the completely autonomous flying machines took more than 2,000 high-resolution photographs. The only remaining task was for software developed by Pix4D, another EPFL spin-off, to assemble them into an impressive 300-million-point 3D model. The model was presented last weekend to participants of the Drone and Aerial Robots Conference (DARC), in New York, by Henri Seydoux, CEO of the French company Parrot, majority shareholder in senseFly.
SenseFly drones generate an amazing 3D model of the Matterhorn
All-terrain and even in swarms
“We want above all to demonstrate what our devices are capable of achieving in the extreme conditions that are found at high altitudes,” explains Jean-Christophe Zufferey, head of senseFly. In addition to the challenges of altitude and atmospheric turbulence, the drones also had to take into consideration, for the first time, the volume of the object being photographed. Up to this point they had only been used to survey relatively flat terrain.
Last week the dynamic Swiss company – which has just moved into new, larger quarters in Cheseaux-sur-Lausanne – also announced that it had made software improvements enabling drones to avoid colliding with each other in flight; now a swarm of drones can be launched simultaneously to undertake even more rapid and precise mapping missions.