Dec 31 2012
Stanford researchers, in collaboration with NASA's Jet Propulsion Laboratory and the Massachusetts Institute of Technology, have designed a robotic platform that could take space exploration to new heights.
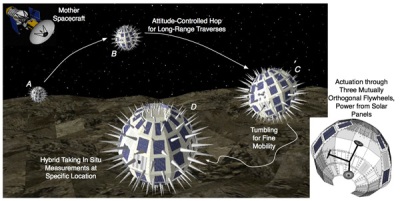 Illustration of how the mother spacecraft Phobos Surveyor and its 'hedgehogs' would work.
Illustration of how the mother spacecraft Phobos Surveyor and its 'hedgehogs' would work.
The mission proposed for the platform involves a mother spacecraft deploying one or several spiked, roughly spherical rovers to the Martian moon Phobos. Measuring about half a meter wide, each rover would hop, tumble and bound across the cratered, lopsided moon, relaying information about its origins, as well as its soil and other surface materials.
Developed by Marco Pavone, an assistant professor in Stanford's Department of Aeronautics and Astronautics, the system relies on a synergistic relationship between the mother spacecraft, known as the Phobos Surveyor, and the rovers it houses, called "hedgehogs." The Phobos Surveyor, a coffee-table-sized vehicle flanked by two umbrella-shaped solar panels, would orbit around Phobos throughout the mission. The researchers have already constructed a prototype.
The Surveyor would release only one hedgehog at a time. Together, the mothership and hedgehogs would work together to determine the hedgehog's position and orientation. Using this information, they would map a trajectory, which the mother craft would then command the hedgehog to travel.
In turn, the spiky explorers would relay scientific measurements back to the Phobos Surveyor, which would forward the data to researchers on Earth. Based on their analysis of the data, the scientists would direct the mothership to the next hedgehog deployment site.
An entire mission would last two to three years. Just flying to Phobos would take the Surveyor about two years. Then the initial reconnaissance phase, during which the Surveyor would map the terrain, would last a few months. The mothership would release each of the five or six hedgehogs several days apart, allowing scientists enough time to decide where to release the next hedgehog.