The development of ‘BIOSwimmer’, an unmanned underwater vehicle with its design similar to a tuna, has been funded by the Department of Homeland Security's (DHS) Science and Technology Directorate (S&T).
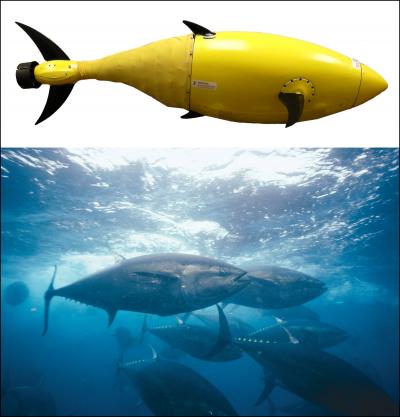 The tuna has a natural body framework ideal for unmanned underwater vehicles (UUVs), solving some of the propulsion and maneuverability problems that plague conventional UUVs, This shows BIOSwimmer™ in the water during testing. Note the line seen is a tether for the camera, not for the fish.
The tuna has a natural body framework ideal for unmanned underwater vehicles (UUVs), solving some of the propulsion and maneuverability problems that plague conventional UUVs, This shows BIOSwimmer™ in the water during testing. Note the line seen is a tether for the camera, not for the fish.
Tuna’s design was selected for emulation as its natural body framework serves to be suitable for unmanned underwater vehicles (UUVs), enabling to meet the propulsion and maneuverability limitations found in conventional UUVs.
Simulated like a real tuna, BIOSwimmer is a UUV that has been specifically created for improved maneuverability in complex environments. Its versatile aft section and rightly positioned sets of pectoral and other fins allow flexible movement. The tuna-inspired frame is the ideal design that enables seamless maneuverability in cluttered and complicated underwater places that require inspection. It is capable of exploring and inspecting the interior voids of ships including flooded bilges and tanks, and complex external areas like propulsion, steerage, and sea chests. Other functions include area searches, inspection and protection of harbors and piers, and other security missions.
The BIOSwimmer is being developed for S&T by Advanced Systems Group of Boston Engineering in Waltham, Massachusetts.
According to the Director of ASG, Mike Rufo, in addition to being deployed in a wide range of tactical missions, BIOSwimmer can be configured on a per-mission basis using its reconfigurable Operator Controls and interchangeable sensor payloads.
Driven by battery, BIOSwimmer ensures long-duration operation. Similar to other unmanned underwater vehicles, this streamlined-body UUV utilizes an onboard computer suite for sensor processing, navigation, and communications. Its laptop-based Operator Control Unit extends simple, mission-defined flexibility and intuitive control for the user. This system remains outstanding from other UUVs due to its internal components and external sensing that ensure efficient operation in tight-space environments and high viscosity fluids.