By Kalwinder KaurJul 19 2012
Recently, Navy scientists have partnered with global research institutions to design and develop resilient robots for minesweeping and complex underwater missions. The team focused on engineering entirely autonomous robots for moving around and mapping cloudy underwater environments and for detecting even the smallest mines.
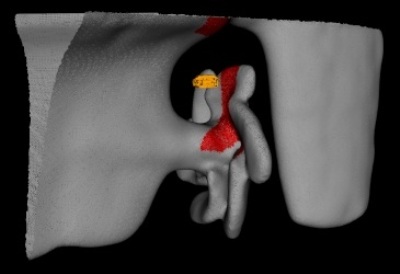 Algorithms developed by MIT researchers enable an autonomous underwater vehicle (AUV) to swim around and reconstruct a ship's propeller. Image: Franz Hover, Brendan Englot
Algorithms developed by MIT researchers enable an autonomous underwater vehicle (AUV) to swim around and reconstruct a ship's propeller. Image: Franz Hover, Brendan Englot
Researchers, Franz Hover and Brendan Englot, have successfully created algorithms that improve robots’ feature-detecting capabilities and navigation. Based on these algorithms, the robot can efficiently swim around a ship’s hull to visually capture propellers, shafts and other structures. Researchers are working to obtain a fine resolution so as to detect even a 10-cm mine fixed to the length of the ship.
These findings have been presented in the International Journal of Robotics Research by Hover and his team.
The researchers are developing algorithms for programming Hovering Autonomous Underwater Vehicle (HAUV). This robot was developed as part of MIT’s Sea Grant program. Since then, this technology was commercialized by spinoff Bluefin Robotics. MIT engineers are making continued efforts to improve its performance.
Autonomous Ship Hull Inspection: 3D Coverage Planning with the HAUV
Researchers used the following two-stage approach to meet the challenge.
In the first stage, the researchers programmed a robot that advances with 10-m distance towards the ship’s hull, followed by swimming around the structure in squares. The in-built sonar camera of the vehicle generates signals that bounce back while the robot navigates around the ship. The resulting sonar signals will then be processed into a grainy point cloud. Low resolution will allow the detection of a ship’s propeller, but will not reveal a small mine.
In the second stage, the robot was programmed to swim closer to the ship, and uses the mesh model to navigate around the structure. The robot is expected to cover every point placed at 10 cm distance in the mesh.
The team has completed field testing of the algorithms and also developed underwater models of two vessels such as the Curtiss, and the Seneca. This month, the group will conduct tests at Boston Harbor.
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.