Purdue University researchers have developed new heat mapping techniques for robots to perceive three-dimensional shapes.
Humans have the ability to perceive and recognize three-dimensional shapes and objects instantly.
 Heat mapping technique helps robots quickly perceive 3D shapes
Heat mapping technique helps robots quickly perceive 3D shapes
The two techniques called as heat distribution and heat mapping enable robots to recognize objects that have bent or twisted shapes. The techniques are based on Albert Einstein’s contributions on diffusion and Fourier’s law. Basic physics and mathematical methods that are related to diffusion of heat over surfaces have been applied in the techniques.
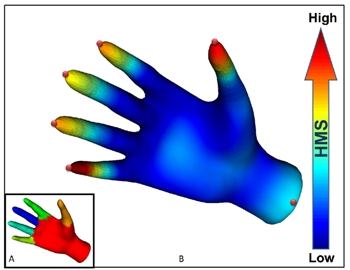
When diffusion of heat occurs over a surface, it captures the contours of the shape of the surface. The heat mapping techniques simulate the flow of heat and in the process characterize the object’s shape. The method initially breaks the object into simple shapes (a triangular mesh) for characterization of surfaces. The flow of heat over the object is then calculated. The data is used by a computer for recognizing the object, even if it is a bent or deformed body part such as a nose, hand or fingers.
Computers normally need to have prior information about the shape of the object, but this technique does away with that need. This technique also allows unsupervised machine learning, which would enable the robot to learn and perceive without prior training.
The heat mapping methods can be used in a wide range of applications including three-dimensional medical imaging, robotic navigation and imaging, multimedia gaming, reading human movements in interactive games, military drones, production of animated films, and in pattern recognition and computer vision.