Scientists at the Surgical Robotics Laboratory of the University of Twente have achieved a breakthrough in collaborative magnetic microrobotics: the successful collaboration of two minuscule magnetic microrobots to manipulate and assemble passive objects in a three-dimensional space. This achievement paves the way for a wide array of applications, especially in the biomedical sector, offering the potential to revolutionize surgery and numerous other industries.
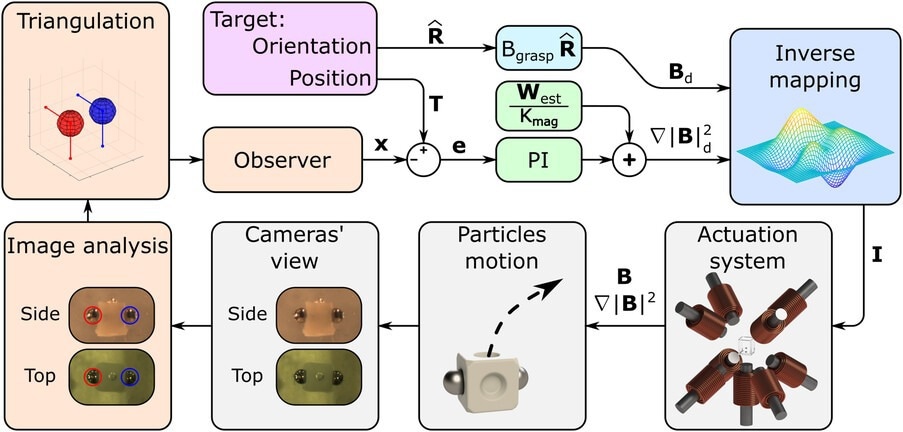
Schematic of the developed control system. The tracking subsystem is in charge of getting the ensemble position x from the cameras’ frames. The position controller is in charge of finding the necessary magnetic gradient ∇◂◽:▸ to drive the ensemble to the target position T. The grasping and orientation controller is in charge of finding the required magnetic field B d to maintain grasping and to rotate the ensemble to the target orientation �^. The inverse mapping is in charge of finding the coils’ currents I that would generate said gradient and field. Credit: Piñan Basualdo, F.N. and Misra, S. (2023)
Why is Robotic Grasping Important?
Incorporating robotic systems has brought increased efficiency and precision to modern industries, reducing costs and enhancing productivity. Robotic grasping, for example, has significantly contributed to automation in various fields. Yet, as technology advances and components become increasingly miniaturized, the demand for micromanipulation solutions has surged, particularly in fields like medicine and biology. Two primary approaches have emerged to address this demand: tethered micromanipulators and untethered microrobots.
Tethered micromanipulators utilize macroscopic arms with miniature end effectors, while untethered microrobots offer mobile and remote actuation. Magnetic actuation, in particular, has proven to be the preferred method due to its precision, biocompatibility, and deep penetration capabilities.
Microrobots, powered by magnetic fields, can grasp and transport passive objects, offering significant advantages over traditional micromanipulation techniques. Collaborative grasping using multiple microrobots has shown immense promise, enabling the control of multiple agents to surround and grasp passive objects. However, until now, such collaborative microrobotic systems have been limited to two-dimensional operations.
In the hopes of addressing this issue, a team of researchers have developed a 3D collaborative microrobotic system based on magnetic actuation. The study was recently published in Advanced Intelligent Systems.
Breakthrough in 3D Microrobotic Grasping
The research addresses the challenges posed by the magnetic properties of these tiny robots, which tend to attract and adhere when they draw too close to each other. The researchers ingeniously harnessed this magnetic behavior to their advantage.
F N Piñan Basualdo and S. Misra - Adv. Intelligent Sys. 2023 - Surgical Robotics Lab
F N Piñan Basualdo and S. Misra - Adv. Intelligent Sys. 2023 - Surgical Robotics Lab. Video Credit: Surgical Robotics Lab/YouTube.com
By controlling two spherical magnetic agents, they achieved grasping, manipulation, and assembly of passive components, all within a three-dimensional space.
A custom-made closed-loop controller played a pivotal role in stabilizing the system, ensuring precise pose control of a grasped passive component with astounding precision - approximately 300 µm in position and 10° in orientation. Moreover, the reconfigurability of these magnetic agents opens doors to diverse applications, such as the assembly and actuation of micromechanisms, offering a promising solution for a broad spectrum of microscale applications.
Besides grasping and assembling rigid passive components, these collaborative magnetic microrobots display the capability to actuate soft or liquid components.
In an experimental demonstration, they moved soft gelatine blocks into a chamber where they dissolved and stirred the resulting solution. This dynamic capability, combined with the precision of their collaborative grasping, offers immense potential for an array of applications, transcending the realms of biomedical studies and promising innovative solutions for various industries.
We can remotely manipulate biomedical samples without contaminating them. This could improve existing procedures and open the door to new ones.
Franco Piñan Basualdo, Corresponding Author
The research is a part of the European RĔGO project within the Horizon Europe program, which aims to develop AI-powered, microsized, untethered, stimuli-responsive swarms of robots, thereby setting the stage for future technological advancements that will reshape the landscape of robotics and automation across a multitude of industries.
Reference:
Piñan Basualdo, F.N. and Misra, S. (2023) ‘Collaborative magnetic agents for 3D microrobotic grasping’, Advanced Intelligent Systems. Available at: https://doi.org/10.1002/aisy.202300365