The heart is the powerhouse of the body; it ensures blood is pumped and flows to send oxygen and nutrients to other vital organs. Similarly, soft robots also require a heart to ensure proper functionality, but these devices usually need to be separated from the body of the soft robot, which can be prone to energy leaks making it less efficient.
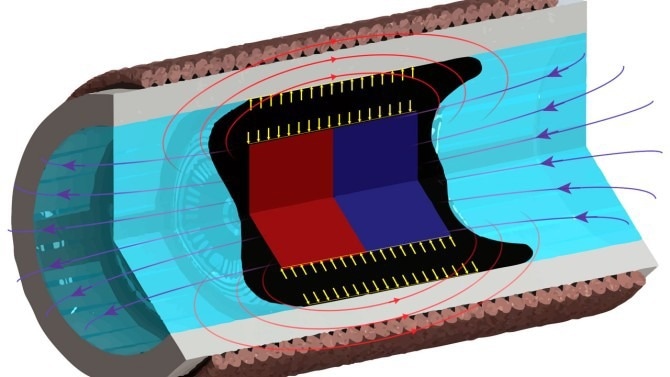
Image Credit: Cornell University
Recently, researchers at Cornell and the U.S. Army Research Laboratory have developed soft robotic hearts with an elastomeric pump well-suited for overcoming the challenges faced in soft robotics. Published in the journal PNAS, the team documented how they use hydrodynamic and magnetic forces to power a soft pump that mimics the function of the heart in humans and other mammals.
These distributed soft pumps operate much more like human hearts and the arteries from which the blood is delivered.
Rob Shepherd, Associate Professor of Mechanical and Aerospace Engineering, Cornell University
“We’ve had robot blood that we published from our group, and now we have robot hearts. The combination of the two will make more lifelike machines,” Shepard continued.
In the same way that humans need the heart to help us function and perform our daily tasks, soft robots require an active circulatory system to store energy and drive the movement in their appendages to complete a series of complex tasks.
Shepperd’s Organics Robotics lab has experience with using soft materials, which have previously found use in various fields and helped develop robots that can walk, swim, and even sweat.
Having now developed a soft deformable pump that is made up of silicone tubing and wire coils – solenoids – the team designed an experiment to show how the system can sustain prolonged periods of performance. The solenoids are spaced apart, which allows the silicone tube to bend and stretch around a solid core surrounded by magnetorheological fluid.
When the deformable pump is exposed to a magnetic field, the fluid around the core stiffens to create a seal and center the solid core. The core magnet is able to move back and forth, depending on how the magnetic field is applied, much like a floating piston, to continuously thrust fluids forward while avoiding jamming.
“We’re operating at pressures and flow rates that are 100 times what has been done in other soft pumps.”
Rob Shepherd, Associate Professor of Mechanical and Aerospace Engineering, Cornell University
“Compared to hard pumps, we’re still about 10 times lower in performance. So that means we can’t push really viscous oils at very high flow rates,” Shepard continued.
The team tracked the performance of the robot heart deformable pump system and discovered that there is potential to customize the heart so that it fits specific robots for specific tasks. This means the soft heart has widespread application potential that could see it utilized for robotics in fields from medicine and patient recovery and other soft robotic applications.
We thought it was important to have scaling relationships for all the different parameters of the pump, so that when we design something new, with different tube diameters and different lengths, we would know how we should tune the pump for the performance we want.
Rob Shepherd, Associate Professor of Mechanical and Aerospace Engineering, Cornell University
The work is the primary step in the development of a viable deformable pump that would serve as a base for advances in future untethered soft pump technology. This could open the door to soft robotics that mimics biological mechanisms, which could see widespread innovation in the field.
We’ve had robot blood that we published from our group, and now we have robot hearts. The combination of the two will make more lifelike machines.
Rob Shepherd, Associate Professor of Mechanical and Aerospace Engineering, Cornell University
References and Further reading
Matia, Y., An, H., Shepherd, R. and Lazarus, N., (2022) Magnetohydrodynamic levitation for high-performance flexible pumps. Proceedings of the National Academy of Sciences, [online] 119(29). Available at: https://www.pnas.org/doi/abs/10.1073/pnas.2203116119
Nutt, D., (2022) Deformable pump gives soft robots a heart | Cornell Chronicle. [online] Cornell Chronicle. Available at: https://news.cornell.edu/stories/2022/07/deformable-pump-gives-soft-robots-heart-0
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.