A robot called Lyra has been employed to check a ventilation duct in the redundant nuclear laboratories at Dounreay and chart the radioactive materials.
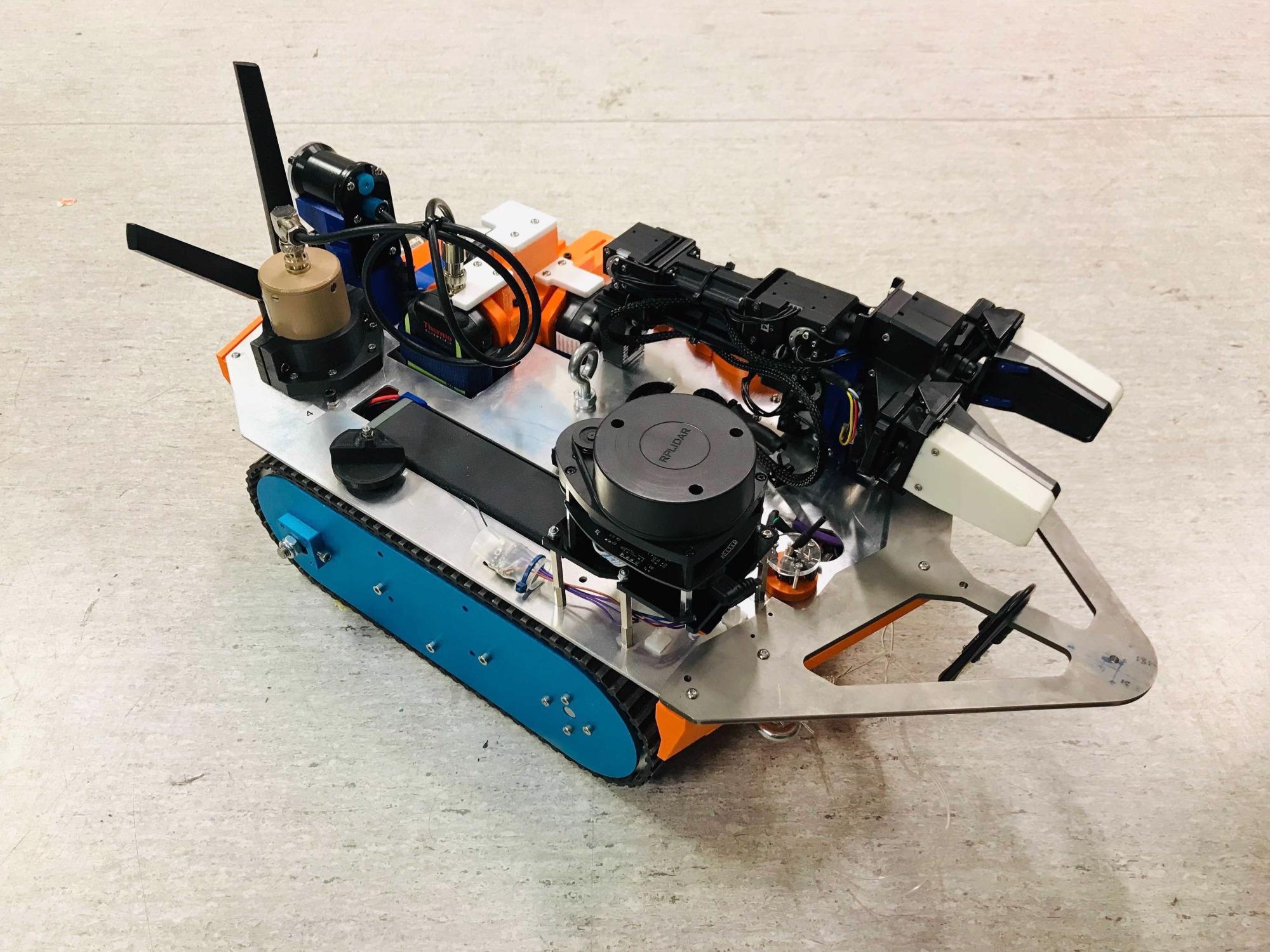
Image Credit: The University of Manchester.
Lyra navigated 140 m of the ventilation duct from a single entry point and gave operators thorough radiological characterization data that can be used to help schedule safe and competent decommissioning of the labs.
Previously, gathering this amount of comprehensive data would be difficult and, even where possible, it would necessitate operations personnel to make extra airline suit entries into contaminated zones, increasing risk and cost. Human access to this zone is at present impossible because of the size of the duct and radiological hazards.
This deployment has demonstrated that mobile robots can be employed to speed up the pace of decommissioning legacy nuclear laboratories in the UK, while simultaneously decreasing the danger to humans, reducing costs and even curtailing the amount of extra low-level waste that is produced during decommissioning.
Lyra’s Design
Lyra was built as an inexpensive robot, containing five radiation detectors, two cameras, a laser scanner for positioning, lights and a manipulator arm that took swab samples of the radioactive contamination from the floor or wall of the duct.
Scientists at The University of Manchester, in partnership with the Robotics and Artificial Intelligence for Nuclear (RAIN) Hub and with substantial direction from technical and operations staff at Dounreay Site Remediation Ltd (DSRL), developed the robot.
Lyra was equipped with tracks and provided a comparatively high ground clearance to allow it to clear the sizeable amounts of rubble that were found in the duct. The radiation sensing system was engineered to be able to quantify X-Ray, beta, gammas and neutrons radiations and a 5 DOF manipulator was attached to allow it to gather swabs for additional radiological examination at the site laboratories.
Cameras were linked to the front of Lyra as well as to the end of the manipulator. The camera linked to the manipulator enabled thorough inspection of any points of interest that were detected during the survey. Lyra is regulated using a joypad, which is used for driving, and a compliant manipulator arm whose motion is replicated by the arm on the robot.
The radiation sensing system together with the LIDAR radar and live camera footage supported a 3D, time-stamped video to be created with the radiation readings as measured overlayed onto the video such that high radiation measurement or any areas of interest could be located at any particular region inside the duct.
Lyra was not tethered but did include a winch retrieval mechanism, which could be applied to pull Lyra back to an access point in case of loss of power, or to move it off debris if it became stranded. A separate, remote reset was also added to Lyra. This was a wireless device that allow Lyra to carry out a ‘hard reset’ if needed.
The Deployment
Lyra’s deployment was completed in collaboration with the operations team at DSRL. Following the positive deployment of Lyra, Jason Simpson Project Manager at DSRL stated: “DSRL is greatly indebted to the team from The University of Manchester, their efforts coupled with that of FIS360 Managing Director Frank Allison have clearly demonstrated the substantial benefits to be gained through collaborative working with the supply chain.”
Now that the characterization survey is complete, we have built up a comprehensive picture of the duct which will help us make informed decisions on how the duct will be decommissioned going forward.
Jason Simpson, Project Manager, DSRL
“Although it is recognised that the incentives to succeed differed for all parties, the enthusiasm and commitment from Frank Allison, Barry Lennox, Matthew Nancekievill, Keir Groves, and the rest of the team at Manchester, ensured our objectives ultimately aligned to culminate in the successful deployment and data capture witnessed via Lyra,” Jason Simpson added.
RAIN Hub Director Barry Lennox stated: “We wanted to demonstrate that the robot could be used successfully in active areas. We added fail safe devices, including a remote “reboot” switch, and a winch to enable us to physically retrieve the robot if it got stuck on the debris in the duct. The survey has demonstrated Lyra’s reliability in active areas.”
The deployment was assisted by innovation and technology transfer experts, FIS360.
The development and deployment of Lyra highlights the benefits that robotics technology offers the nuclear industry and the importance of academia, end-users, and businesses in the supply chain working together. It is only through collaborative working, like this, that solutions can be developed for complex challenges, such as surveying the Dounreay duct.
Frank Allison, Managing Director, FIS360
The researchers are thankful for the use of the Lyra robot, which was made available for this study via the NNUF Hot Robotics Program.
Lyra is one of the examples of mobile robotic systems engineered for inspection of dangerous environments and is commercially available via Ice Nine Ltd.
Video Credit: The University of Manchester