Dennis Yeung, a doctoral candidate at Aalto University, and his research team have designed and tested a new type of technology that improves prosthesis compatibility with the amputated area.
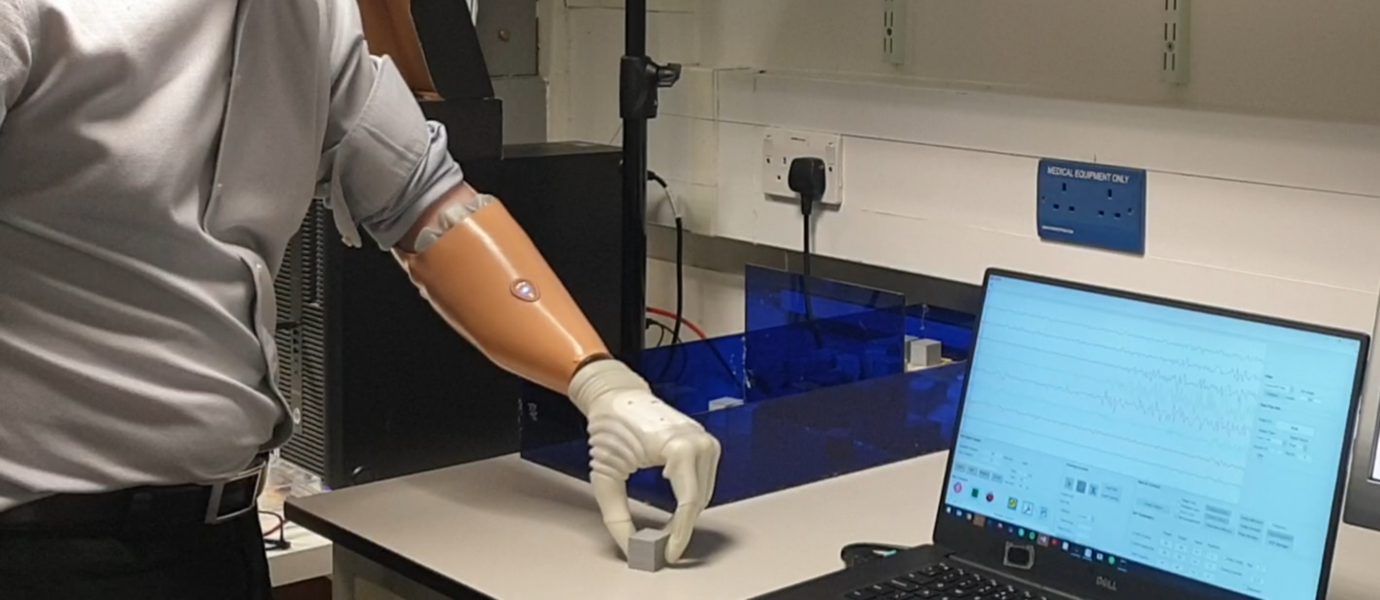 A modern hand prosthesis controlled via the activation of muscles in the residual limb. Image Credit: Aalto University/Irene Guerra Mendez.
A modern hand prosthesis controlled via the activation of muscles in the residual limb. Image Credit: Aalto University/Irene Guerra Mendez.
Helsinki University Hospital (HUS) and Imperial College London collaborated on the study and the Finnish Academy and the European Research Council funded the research.
Individuals who have had their upper limbs amputated can use their remaining muscles to control the robotic prosthesis. A myoelectric interface is a connection where a prosthesis identifies electrical signals produced by the muscle.
Machine learning algorithms are used in the most advanced prostheses to help interpret these user-generated signals. External factors, such as sweating, can make such connections very sensitive, and they can weaken over time. To address this issue, researchers have proposed a number of algorithms that could better adapt to the changing conditions.
Currently available systems require the user to make adjustments or take other actions, but Yeung and his team created a fully automated system that learns during normal use and adapts to changing conditions.
In this system, the user and the system learn from each other simultaneously. This has potential benefits in improving the convenience and robustness of robotic prostheses.
Dennis Yeung, Doctoral Candidate, Aalto University
More Reliable Prostheses
The research findings were evaluated in a virtual environment and compared to existing systems. Following these successful tests, the scientists tested the user interface with a cutting-edge prosthesis at Imperial College London by having an amputee perform Clothespin Relocation Tests, which are commonly used by physiotherapists to assess upper-limb function.
Adaptive prosthetic devices can be quite costly. Individuals and public health institutions face fewer financial risks when obtaining prostheses if the systems are more reliable.
Controlled and standardized tests have been used to investigate the system’s functionality, and yet qualitative longitudinal studies are the key to determining the needs of users.
For future development, it is very important to continue cooperation with health care centers and prosthesis users.
Dennis Yeung, Doctoral Candidate, Aalto University
Journal Reference:
Yeung, D., et al. (2022) Co-adaptive control of bionic limbs via unsupervised adaptation of muscle synergies. IEEE Transactions on Biomedical Engineering. doi.org/10.1109/TBME.2022.3150665.