Sep 9 2020
It is no surprise that the sophisticated calculations for the best movement of a pair of robot arms to accurately direct a tool involve highly challenging optimization tasks. This complexity also increases considerably when the tool itself is not stiff, but rather flexible in all directions and also bends in a different way based on its movement and position.
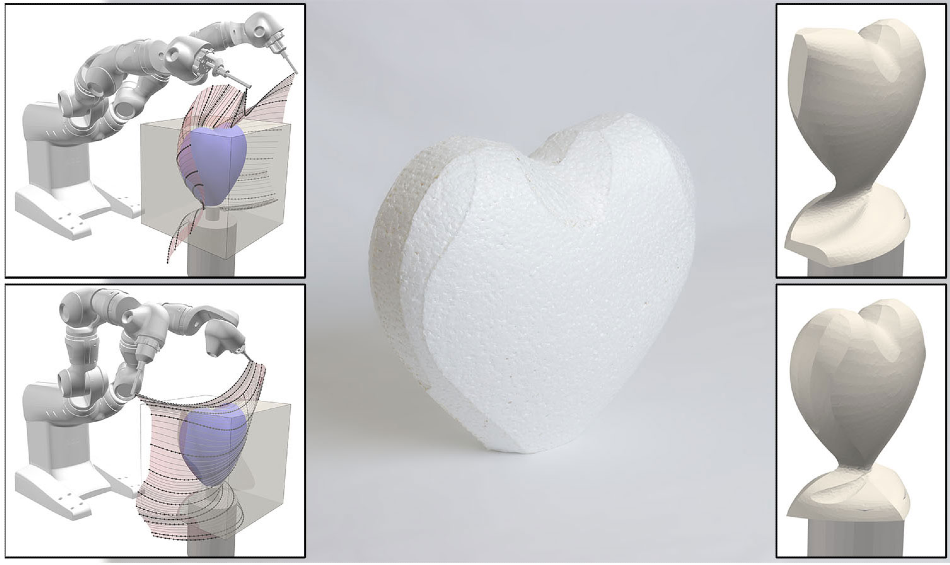 RoboCut is also able to carve hearts. Image Credit: The Computational Robotics Lab.
RoboCut is also able to carve hearts. Image Credit: The Computational Robotics Lab.
Simon Dünser from Stelian Coros’ research team from the Institute for Intelligent Interactive Systems has collaborated with other scientists to design a hot-wire cutter robot with a wire that bends flexibly while working.
This enables the robot to produce relatively more complex shapes in considerably fewer cuts when compared to the earlier systems, in which the electrically heatable wire is stiff and, therefore, can only cut ruled surfaces from fusible plastics that have a straight line at each point.
Carving Rabbits and Designing Façades
On the other hand, the RoboCut developed by the ETH computer scientists is not merely restricted to cones, cylinders, planes, or saddle surfaces, but can also produce grooves in a plastic block.
But the biggest benefit is that the targeted bending of the wire would translate to relatively fewer cuts than if the shape of the target had to be approximated using ruled surfaces. Consequently, the bendable wire can be used for producing the figure of a sitting rabbit from a polystyrene block using only 10 cuts with wood carving-like precision. The silhouette of the rabbit can be clearly detected after only two cuts.
Besides the rudimentary enhancement over conventional hot-wire techniques, the RoboCut project also has other particular application objectives in mind. For instance, in the days to come, the technology could be utilized in architecture to create separate polystyrene molds for concrete parts. This would allow a more diverse design of façades and lead to the development of new kinds of modular building systems.
Three Linked Optimizations Simultaneously
For Dünser, the scientific challenges were the project’s focal point.
The complex optimisation calculations are what make RoboCut special. These are needed to find the most efficient tool paths possible while melting the desired shape from the polystyrene block as precisely as possible.
Simon Dünser, Institute for Intelligent Interactive Systems, ETH Zürich
The wire was fixed to ABB’s two-armed Yumi robot to shift it in a controlled way. Initially, the response of the wire to the robotic arm movements had to be computed. Positions that would result in the unstable placement of the wire, or where there was a danger of wire breakage, were established through simulations and subsequently removed.
Based on this, the ETH team was able to design the actual optimization. They had to consider three linked aspects at the same time. On the physical level, it was significant to estimate the regulated movement and bending of the wire to perform the preferred cuts.
With regard to the shape, a cutting sequence needs to be established that would enable a highly accurate approximation of the surface to the target shape in relatively few steps. Eventually, collisions with robot components or its surrounding and accidental cuts had to be excluded.
Preventing Bad Minima
Dünser is one of the first investigators to succeed in incorporating all the parameters of this complicated task into a global optimization algorithm. To perform this, Dünser developed a structured methodology based on the main objective that the wire should invariably cut very close to the surface of the target object. All other limitations were subsequently assigned costs and were improved on the whole.
But without additional devices, these calculations invariably fall into local minima, resulting in a pointless end outcome.
To avoid this, Dünser ironed out the cost function as a first step and started the calculation with a cut that was more or less adapted to the target shape. Then, the cutting simulation was slowly brought closer to the target shape until the preferred precision was obtained.
Method with Versatile Potential
Designed by Dünser, the technique is not simply restricted to hot-wire cutting. The architecture of the tool path for other milling and cutting technologies could also gain from it in the days to come. The technique produces a relatively higher level of scope for simulation, specifically in the production of intricate, non-rotationally symmetrical shapes.
This technology could directly benefit electrical discharge machining with wires, as it allows high-precision cutting of electrically conductive materials through spark ablation. This may involve bendable electrode wires in the future.
This implies that—similar to the hot-wire cutting of plastics—more complex and, therefore, more efficient cuts can be made more effortlessly when compared to present-day rigid wires.
One particular application for the RoboCut technology is being scheduled in collaboration with a research team from EPF Lausanne. Using a large-scale version of the hot-wire cutting robot, the team will develop systematic building blocks for building structures that are free of mortar and fastening technologies.
The elements themselves should hold together in a consistent way. In the days to come, the robot could even be used to cut the polystyrene molds with which the numerous bricks are cast in concrete. Therefore, the ingenious plastic cutter also forms the concrete construction technology of the future.
A robot that controls highly flexible tools
ETH computer scientists have developed a hot-wire cutting robot that guides highly flexible tools so precisely that it is able to carve a rabbit. Video Credit: ETH Zürich/The Computational Robotics Lab.
Journal Reference:
Dünser, S., et al. (2020) RoboCut: hot-wire cutting with robot-controlled flexible rods. ACM Transactions on Graphics. doi.org/10.1145/3386569.3392465.