Jun 19 2020
During a space mission, it is crucial to perform accurate tracking of the relative six-degree-of-freedom (6-DOF) pose of a spacecraft in close range—such as debris removal, landing, rendezvous, and docking.
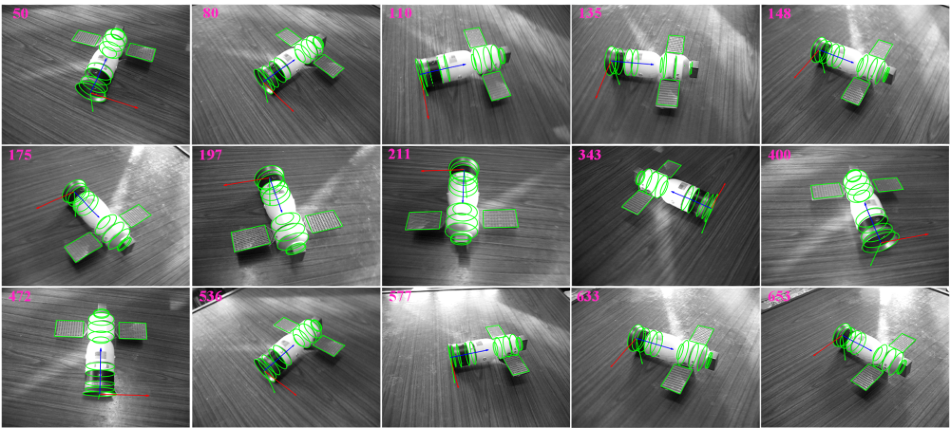 Examples of the tracking for the manned spacecraft model. Image Credit: LIU Chang.
Examples of the tracking for the manned spacecraft model. Image Credit: LIU Chang.
The pose tracking is extremely important for the guidance, navigation, and control technologies of the spacecraft.
Recently, computer vision techniques have turned out to be highly critical for 6-DOF pose tracking. This is because they are less expensive, consume low energy, and feature rapidness and long work range.
By contrast, conventional vision-based techniques for pose tracking struggle due to comparatively long runtime, low accuracy, and inability to determine the pose of spacecraft that have multi-rigid-body structure.
Researchers at the Shenzhen Institutes of Advanced Technology (SIAT) of the Chinese Academy of Sciences collaborated with their colleagues from Beihang University and created an innovative vision-based algorithm to achieve tracking of the 6-DOF pose of a multi-rigid-body spacecraft in real-time.
The findings of the study have been reported in the IEEE Transactions on Aerospace and Electronic Systems journal.
Several geometric primitives (or GPs for short)—such as circles, line segments, cones, spheres, developable surfaces, cylinders, etc.—exist on a regular spacecraft. The 6-DOF pose of the spacecraft is tracked by the newly developed algorithm by geometrically fitting the GPs on the spacecraft using Generalized Expectation-Maximization, Extended Kalman Filter, and M-estimation.
The use of this algorithm could eventually offer the maximum likelihood estimation (MLE) for the pose of spacecraft and could even outclass other more advanced methods for pose tracking with respect to rapidness and accuracy.
Using extensive real and synthetic experiments, the researchers confirmed that the newly developed algorithm could meet the pose tracking of spacecraft with nearly 33.33 Hz. It was also verified that the algorithm exhibits sufficient resistance to background clutter and random noise, as well as robustness to drastic changes in illumination across the space environment.
Journal Reference:
Liu, C., et al. (2020) Real-time Vision-based Pose Tracking of Spacecraft in Close Range Using Geometric Curve Fitting. IEEE Transactions on Aerospace and Electronic Systems. doi.org/10.1109/TAES.2020.2996074.