Jun 2 2020
At the University of California, San Diego, roboticists have successfully produced flexible feet that can aid robots to walk up to 40% faster on uneven ground such as wood chips and pebbles. The study holds applications for space exploration and search-and-rescue operations.
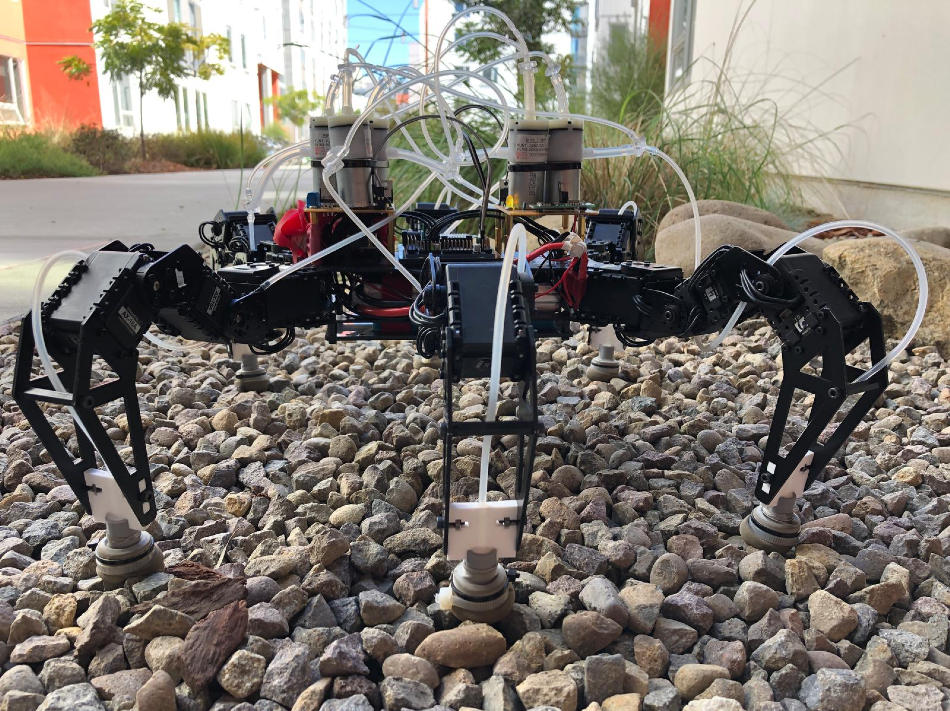 An off-the-shelf six-legged robot equipped with the feet designed by UC San Diego engineers can walk up to 40% faster than when not equipped with the feet. Image Credit: University of California, San Diego.
An off-the-shelf six-legged robot equipped with the feet designed by UC San Diego engineers can walk up to 40% faster than when not equipped with the feet. Image Credit: University of California, San Diego.
Robots need to be able to walk fast and efficiently on natural, uneven terrain so they can go everywhere humans can go, but maybe shouldn’t.
Emily Lathrop, Study First Author and PhD Student, Jacobs School of Engineering, University of California, San Diego
The scientists will demonstrate their latest results at the virtual RoboSoft conference taking place from May 15th to July 15th, 2020.
Usually, robots are only able to control motion at specific joints. In this work, we showed that a robot that can control the stiffness, and hence the shape, of its feet outperforms traditional designs and is able to adapt to a wide variety of terrains.
Michael T. Tolley, Study Senior Author and Professor, Department of Mechanical and Aerospace Engineering, University of California, San Diego
The feet are elastic spheres produced from a latex membrane embedded with coffee grounds. The coffee grounds are integrated with structures inspired by man-made solutions such as piles pushed into the ground to steady the slopes, and by nature, like plant roots.
The flexible feet enable the robots to grip better and walk more quickly through a mechanism known as granular jamming. This mechanism enables granular media—the coffee grounds in this case—to move to and fro between acting like a liquid and acting like a solid.
The feet firm up upon hitting the ground, conforming to the ground underneath and offering a strong footing. When transitioning between steps, the flexible feet subsequently unlock and loosen up. Through the support structures, the flexible feet are able to stay rigid while remaining jammed.
This is the first time such flexible feet have been tested on uneven ground.
The flexible feet were set up on a hexapod robot available in the market. The scientists designed and constructed a new on-board system that can produce positive pressure to unlock the feet between every step, and also negative pressure to manage the jamming of the feet.
The feet can therefore be actively jammed, through a vacuum pump that eliminates the air present between the coffee grounds and thus stiffens the foot. However, the feet can also be passively jammed, and this occurs when the weight of the robot drives the air present between the coffee grounds, making them rigid.
The scientists then tested the robot treading on pebbles, wood chips, and flat ground, both with and without the flexible feet. The team observed that while the passive jamming feet performed optimally on flat ground, the active jamming feet performed better on loose rocks.
In addition, the flexible feet allowed the robot’s legs to grip the ground in a relatively better way, thereby boosting its speed. Such enhancements were specifically important when the robot walks up uneven and sloped terrain.
The natural world is filled with challenging grounds for walking robots---slippery, rocky, and squishy substrates all make walking complicated. Feet that can adapt to these different types of ground can help robots improve mobility.
Nick Gravish, Study Coauthor and Professor, Department of Mechanical and Aerospace Engineering, University of California, San Diego
In a companion article, jointly penned by Tolley and Gravish along with PhD student Shivan Chopra as the study’s first author, the scientists accurately measured the level of improvement produced by each flexible foot.
For instance, the foot reduced the penetration depth in the sand on impact by as much as 62%; and decreased the force needed to extract the foot by 98% when compared to a completely rigid foot.
The subsequent steps involve integrating soft sensors on the base of the flexible feet to enable an electronic control board to detect the kind of terrain that would be navigated by the robot and to find whether the feet must be jammed passively or actively.
The team will also continue to enhance the control and design algorithms to render the flexible feet more efficient.
Granular boots for bots
Video Credit: University of California, San Diego.