May 19 2020
At the University of California San Diego, roboticists have designed a user-friendly and inexpensive system to monitor the position of flexible surgical robots within the human body.
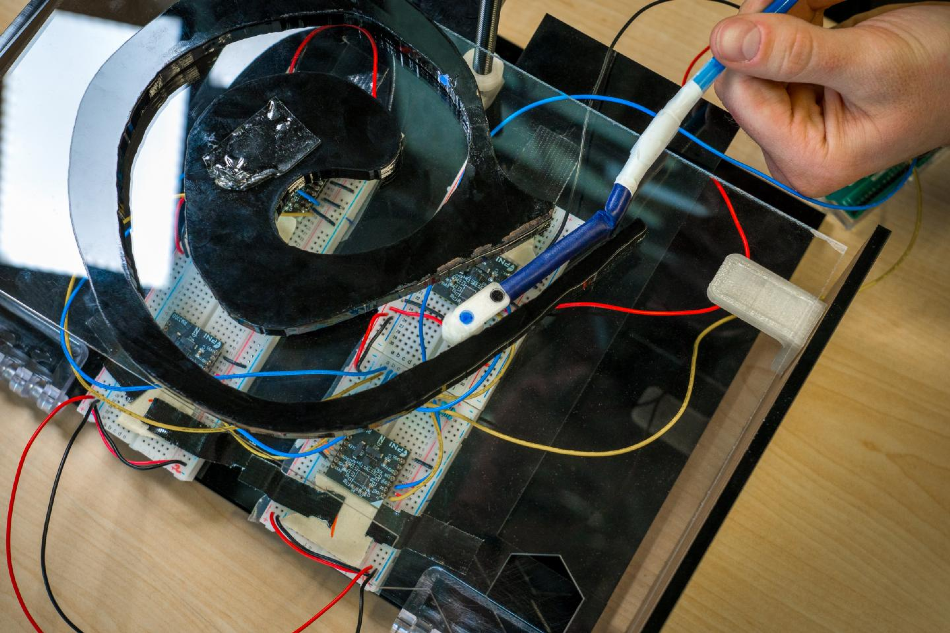
Image Credit: David Baillot/University of California San Diego.
The system performs as good as existing advanced techniques but it is less costly. While several existing techniques need exposure to radiation, this system does not.
The system was designed by Tania Morimoto, a professor of mechanical engineering at the Jacobs School of Engineering at UC San Diego, and mechanical engineering PhD student Connor Watson.
The study outcomes were reported in the April 2020 issue of IEEE Robotics and Automation Letters.
Continuum medical robots work really well in highly constrained environments inside the body. They're inherently safer and more compliant than rigid tools. But it becomes a lot harder to track their location and their shape inside the body. And so if we are able track them more easily that would be a great benefit both to patients and surgeons.
Tania Morimoto, Professor of Mechanical Engineering, Jacobs School of Engineering, University of California San Diego
The scientists fixed a magnet at the tip of an adaptable robot that can be utilized in sensitive places within the body, like the brain’s arterial passages.
We worked with a growing robot, which is a robot made of a very thin nylon that we invert, almost like a sock, and pressurize with a fluid which causes the robot to grow.
Connor Watson, PhD Student, Mechanical Engineering, University of California San Diego
Since the robot is soft and shifts by growing, it does not have much impact on its environment, making it perfect for use in medical settings.
Furthermore, the scientists utilized current magnet localization techniques, which work similar to GPS, to design a computer model that estimates the location of the robot. GPS satellites ping smartphones, and based on the time taken for the signal to arrive, the GPS receiver in the smartphone can identify the location of the cell phone.
In the same way, scientists understand how powerful the magnetic field must be near the magnet that has been fitted in the robot. They depend on four sensors that are cautiously spaced around the region where the robot functions, to quantify the strength of the magnetic field. Based on the strength of the field, the researchers can find out where the tip of the robot is located.
The cost of the entire system, with the magnet localization setup, magnets, and robot, is approximately $100.
Morimoto and Watson took a step forward. They trained a neural network to find out the discrepancy between what the sensors were reading and what the model indicated the sensors should be reading. Consequently, the researchers enhanced localization precision to track the robot tip.
Ideally we are hoping that our localization tools can help improve these kinds of growing robot technologies. We want to push this research forward so that we can test our system in a clinical setting and eventually translate it into clinical use.
Tania Morimoto, Professor of Mechanical Engineering, Jacobs School of Engineering, University of California San Diego
Journal Reference:
Watson. C., et al. (2020) Permanent Magnet-Based Localization for Growing Robots in Medical Applications. IEEE Robotics and Automation Letters. doi.org/10.1109/LRA.2020.2972890.