Aug 5 2019
In the past few years, soft robots have received a great deal of attention for their special characteristics when compared to conventional rigid robots.
 (Image credit: Science China Press)
(Image credit: Science China Press)
Conversely, next-generation soft robots are different from the Baymax in the film titled “Big Hero 6” and are merely prototypes in laboratories. They are often tethered, which means, a pneumatic tubing or electrical wire is required to power them. Untethered design is generally preferred to exploit the complete potential of soft robots.
In current methods, high energy-density powering sources are often required to integrate the soft robots with untethered design. However, these sources generally result in integration issues, or otherwise the robot will be clumsy and bulky to carry low energy-density power sources.
There are enormous creatures in nature that have emerged for billions of years for surviving. For example, rove beetles in genus Stenus, a group of terrestrial insects living around streams or pools, would receive a burst of kinetic energy to escape when they inadvertently fall onto the water, by releasing chemicals to create a surface energy gradient. This kind of propulsive process, often called Marangoni Propulsion, was used by live creatures, and hence it was gentle and mild, and fully adaptable with soft materials.
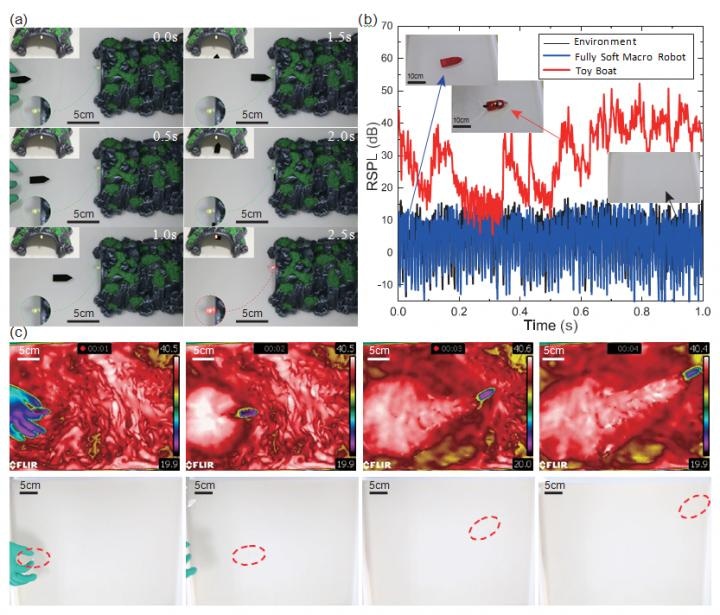
Now, researchers at Huazhong University of Science & Technology have described an untethered fully soft robot in liquid in the latest research article reported in the Beijing-based National Science Review. The actuation of this soft robot uses environmental energy gradients.
The robot, after discharging environmental active materials, or EAMs, to the liquid environment, can gain an agile speed of 5.5 body lengths each second, which is seven times more than the best-reported value in the untethered soft robotic fish.
A few advantages occur by adopting such aß mechanism, such as quietness, no thermal fatigue and so on. More importantly, the actuation and the robot functional realization can be complemented separately. The designer, for the first time, gains the opportunity to focus on the function realization. This might enable the soft robot in some untouched scenarios in the future.
Zhigang Wu, Professor, Huazhong University of Science and Technology
The National Natural Science Foundation of China funded the study.