Jul 18 2019
A new control system for deformable robot-fingertips has been created for holding and releasing things.
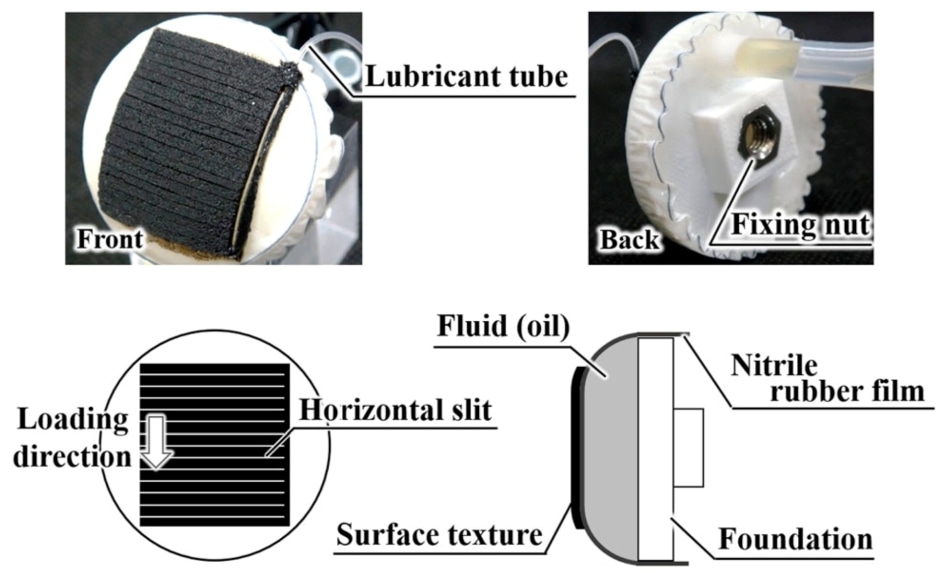 Fluid fingertip with surface texture bonded. (Image credit: Kanazawa University)
Fluid fingertip with surface texture bonded. (Image credit: Kanazawa University)
Robot fingertips that were designed earlier have high friction texture that can firmly hold a paper box or a soft object under dry as well as wet conditions. Upon injecting a lubricant (absolute ethanol), the held object slipped downward without modifying the posture of the robot fingertips. The present controlling system using lubricant is applicable to robot tasks in a constricted space.
Background
At present, industrial robots are extensively used and are crucial in car manufacturing and in other domains. Traditional robot hands are ideal for holding hard objects of definite shape, whereas it is difficult to hold complicated objects or to gently hold soft objects. It is also important, under different conditions, to respond to physical characteristics of objects, for example, surface characteristics—dry, wet, etc.
A robot hand’s soft-surfaced fingertip can be deformed and can hold an object of intricate shape quite effortlessly because the contact area can be enlarged by surface deformation according to the object form. Soft-surfaced fingertips are so efficient in grasping soft objects that it can even hold tofu.
However, the surface friction of soft materials is usually high, due to which releasing is more difficult. Furthermore, it is difficult to let go of objects to required positions, particularly in situations where the working space is constricted.
Results
A team headed by Prof. Tetsuyou Watanabe at Kanazawa University has been studying control technology for clasping objects using the fingertips of robot hands. In the current research, the team intended to create a friction control system.
The team employed the soft fingertips of a robot hand to grab objects, and by applying (injecting) a lubricant, releasing was achieved. This research involved using absolute ethanol (>99.5%) as the lubricant. This is because ethanol is chemically safe, easy to dry, and has low surface tension.
A nitrile rubber film was attached to the sides of the fingertip foundation to form a gap for filling with chain saw oil to create a “fluid fingertip.” After that, a silicone “texture” was bonded to cover the rubber film; the material of the “texture” was a silicone sealant with slits, whose distance was 1.5 mm, normal to the load direction.
The slits were subjected to significant friction under a water-wet condition and for lubricant spreading. With this fluid fingertip, objects of different materials like those used for kitchen utensils were clasped and it was established that, when the lubricant was injected, the friction actually decreased. The friction decreased under wet as well as dry conditions, whereas such a lubricating effect was not seen under an oily condition.
Next, a box packing task simulation was carried out. A paper box was held with two fluid fingertips from either side. The “texture” earlier mentioned was connected to each fluid fingertip. Stable grasping was substantiated by placing a weight on the paper box.
After taking out the weight, lubricant was applied to both fluid fingertips, which resulted in a downward slipping of the paper box in a relatively short time (less than 2.5 seconds), so that the paper box packaging job was accomplished.
By bonding a “texture” of high friction to the fluid fingertip and injecting a lubricant (here, absolute ethanol), the friction was decreased. Therefore, releasing and positioning an object at a required position was achieved by controlling the friction without moving the fingertips.
Future Prospects
In this work, it was confirmed that by applying an appropriate lubricant, it was possible to control object grasping by soft surface fluid fingertips with high friction. However, it is important to perform more experiments under different conditions in order to implement the existing controlling technology in manufacturing environments.
Nevertheless, this research is likely to be a step forward in achieving work automation of, for instance, grasping and releasing of objects in a constricted space.