When thinking of ecology, robotics is not the first thing that comes to mind. However, new research unveils how robotic technologies could be used to help mitigate the effects of invasive species. We speak with Dr. Giovanni Polverino about this unlikely relationship, and how by inducing fear, a robot fish has opened a new door in ecological research.
Please could you introduce yourself and tell us what inspired your career into ecological research?
I was born in Italy, in Rome in 1985, and I have loved animals since I can remember, playing with them in the garden and collecting them at home. I ended up using them as my experimental animals for my first bachelor's and my first master's thesis.
I think it's no surprise that I ended up studying animals and what they do for a living and it's what I enjoy doing.
How did your involvement with robotics begin?
So, it was the end of 2010 when I was submitting my master thesis and publishing my first paper, and in the institute where I was, one of the most senior researchers there told me that there was an engineer at a university in New York that was just setting this new idea of using robots to study animal behavior.
The lab was predominantly engineering, and they were looking for a biologist. I interviewed and within three weeks I was buying a one-way flight to New York City.
When I started to work with robotics and fish, we followed existing experimental practice, creating robots as friends that could be integrated into a group of social animals and using the robots to understand how social animals interact with one another.

© topimages/Shutterstock.com
I left New York City to enroll into a master program in Spain. There, I learned about international treaties and management practices related to biodiversity conservation, including the negative impact of invasive and pest species on biodiversity globally.
What I found interesting was that one of the 100 worst invasive species globally, number 39 to be exact, is a fish very similar to those I had already studied in New York.
With this in mind, I returned to the lab in New York City, and set out on a journey to explore whether a robotic predator can reduce the aggressive behavior of the invasive mosquitofish (Gambusia holbrooki) and mitigate its negative effects on the native fauna.
Could you outline your recent research to our readers?
During my Ph.D. in Germany, I gained more experience on the ecology and evolution of mosquitofish, which helped a lot when my U.S. collaborators and I decided to develop a more realistic predator-mimicking robot that interacted with the pest in real-time.
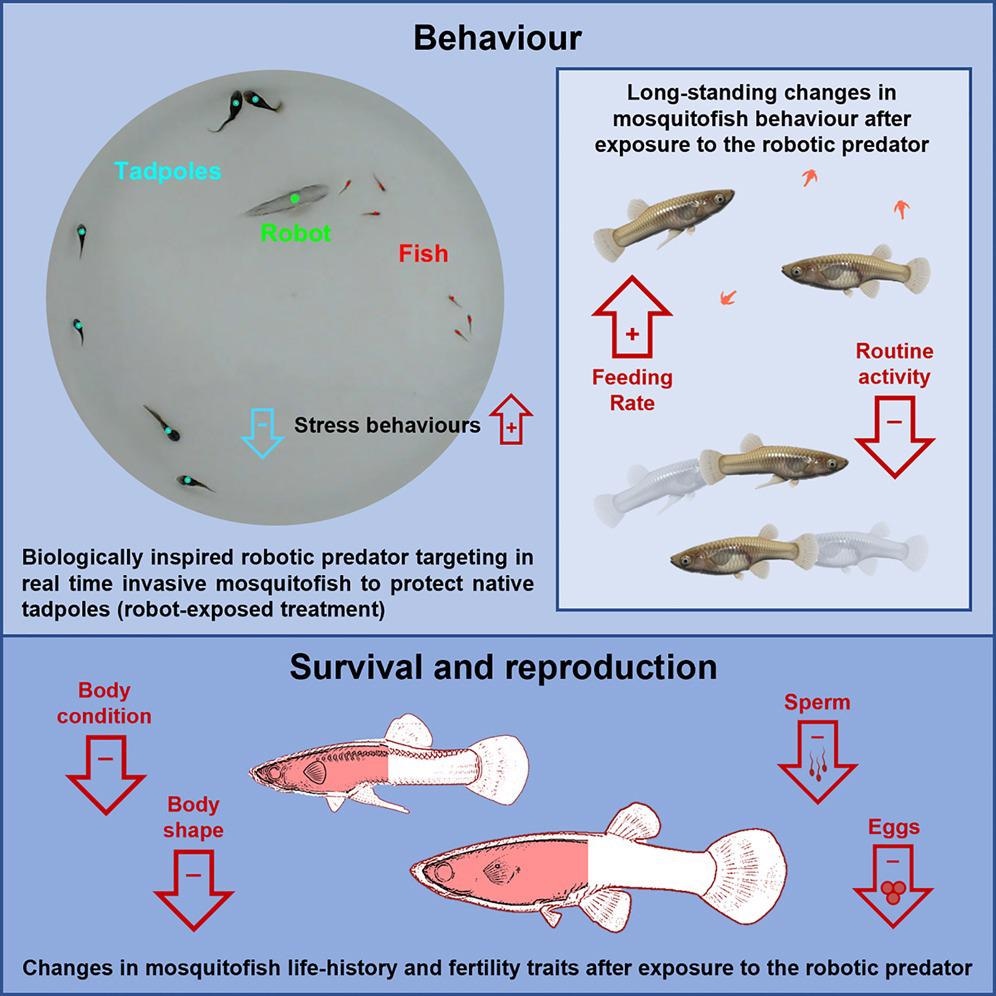
The point of this new research was to see whether brief exposures to a technologically-advanced robotic predator could safeguard endangered species from the aggressive mosquitofish, and at the same time compromise the health, reproduction, and survival of the invader.
By causing a little bit of stress, which is non-lethal and no different than what we may feel when approaching a deadline, we saw that males produce much less sperm. Females were also found to produce fewer eggs. Essentially, their health and life expecting drop; we expect these repercussions to be long-term.
Ecology of fear in highly invasive fish revealed by robots © G. Polverino, et al (2022)
What is the global impact mosquitofish have as an invasive species?
Around 20 years ago, the International Union for Conservation of Nature listed the mosquitofish 39 within the 100 world's worst invasive species list.
The fish bites and damages the tails of the other fishes, amphibians, like tadpoles, and eats their eggs. Plenty of studies have shown that when the mosquito fish spread and colonize new environments, other native species decline or even become extinct.
The use of robots to study animal behavior is an innovative area of study showcasing the potential of multidisciplinary research. Why is robotics particularly suited to this application?
Understanding the mechanisms of social behavior in animals is typically achieved by observing how one individual responds to the stimuli from another individual. But the stimulus individual cannot be controlled, and its behavior will vary depending on many factors, such as hunger, health, age, gender, and more. So it can be extremely chaotic to study the behavioral responses of animals when the stimulus that triggered that response is not consistent.
With robotics, the advantage is that we manipulate the stimulus precisely and the stimulus is consistent. It's adjustable, so we can do the same thing over and over and do what we want the animal to do.
Were there any parameters that were particularly critical to the robot's design?
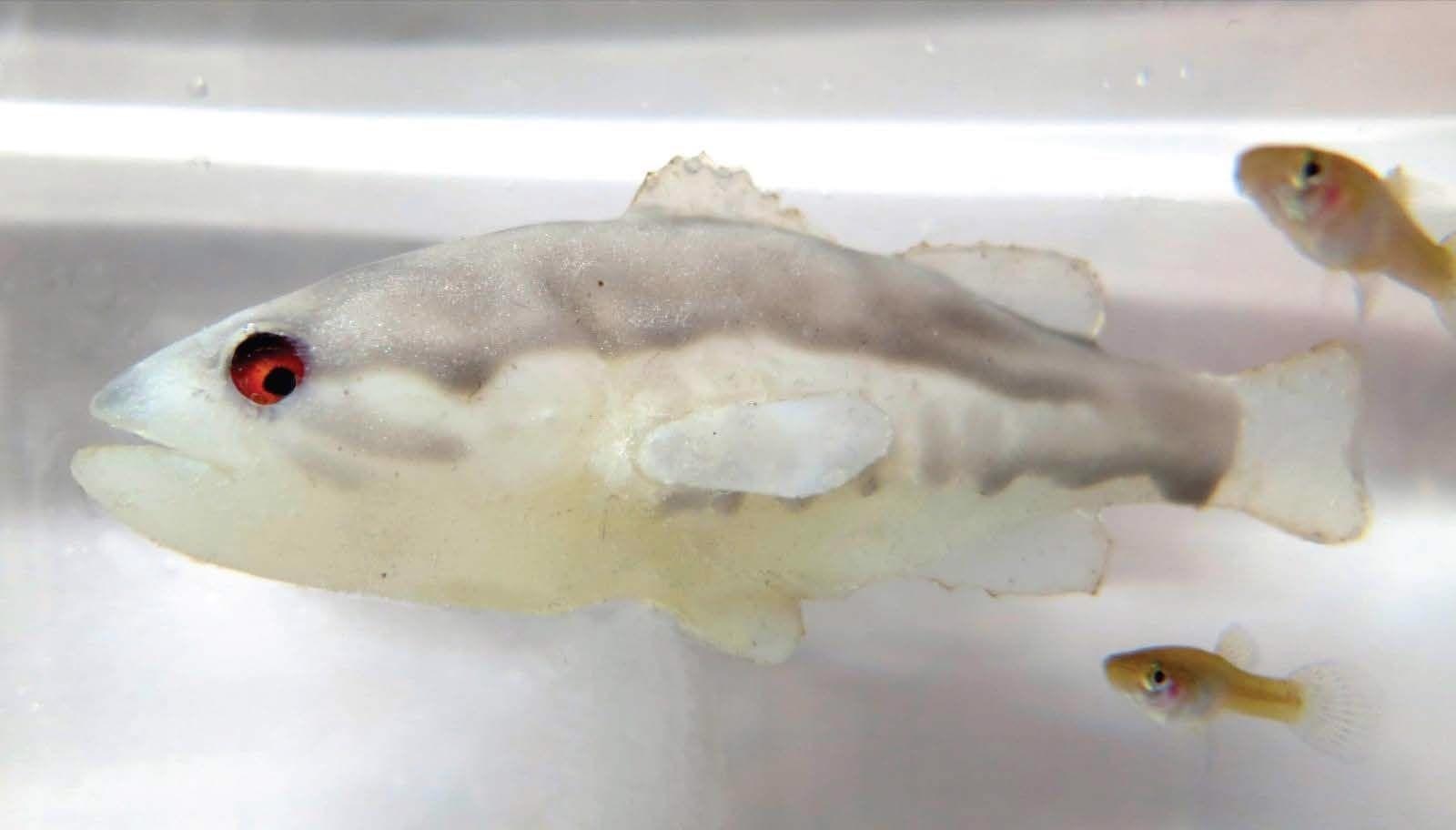
We calibrated the parameters in a previous study, and we demonstrated how a robot should look and how a robot should move to scare the mosquitofish the most.
We started from a very simple robot and added complexity to make it more and more similar to what the live predator actually does. As the robot got more complex, the fear became more intense.
It became clear that if you want to observe a real reaction, you need to have something that looks very real.

The robotic fish, mosquitofish and tadpoles are in a testing arena where computer vision guides the robot's movements and attacks against the fish. © The University of Western Australia
Why was it important to design a computer vision software that would enable the predator robot to respond in real-time?
I think computer vision was the most recent advance that this experiment has brought to the table.
We already had the robot from the 2019 project, and we already knew that it was good enough. The thing is that robot was interacting with one fish only.
This time, our robot was interacting with multiple fish. The computer vision system acted as the eyes of the robot, figuring out which fish was what in real-time and then sending this information to the algorithm. Essentially, it acted as the brain of the robot fish.
Non-lethal biocontrol strategies are favored from an ethical standpoint. Why is this and what impact do you think the results of this research will have on how these strategies are designed in the future?
For many years we have tried to eradicate mosquitofish from the areas it has colonized, but these attempts have been largely unsuccessful. The problem is also ethical, as you said. So, killing the animals one by one altogether, especially for certain species that are more emotionally linked to us, might not be as easy.
In Italy, we have a serious problem with pigeons, which damage our historical monuments with their acidic poop. However, people do not want to kill them. So we have adopted a non-invasive control strategy, replacing the eggs in the pigeons' nests with fake eggs, with the hope of reducing offspring numbers.
Our approach also has a non-lethal effect. We are stressing them in a very natural way by replicating predator-prey dynamics.
The knowledge of such approaches can be scaled to any other organism on the planet - it doesn't have to be a fish and it doesn't have to be an invasive species.
© Giovanni Polverino
How do you envision the role of biologically inspired robots in ecological and evolutionary research changing over the next 30 years? Are there any trends you foresee?
So, let's say we are at time zero.
What's going to happen in 30 years is completely unpredictable because there is not a trend we can see. Still, I assume scientists are curious people, and if there is a technique that can produce better results, I imagine they will want to incorporate it into their research.
We developed a robotic tool, but we also established a piece of knowledge: by injecting fear, you can cause a long list of collateral effects in the long term.
I would say the scientific knowledge will be used as a foundation for many avenues of research, not necessarily with robotics.
What are the major challenges that limit further development in this field?
Like many areas of science, funding significantly influences development. It is so important to facilitate public understanding. By sharing science, we can show people that it has applications that can help societies move forward.
Are there any target species that you are interested in exploring next? How might your current approach be adapted to research other species?
Without hesitation, I would say insects.
The approach would have to completely change as insects do not heavily rely on visual communication. Instead, they interact with the environment chemically, and a robot resembling an insect is not as critical to observe, for example, non-lethal effects.
What aspect of this research did you find the most exciting?
I enjoy challenges and tend not to shy away from them. Through this research, we were able to fill in many contextual and technical gaps and I believe we have made a significant impact on knowledge surrounding this field.
I think this research is exciting because it's novel, innovative, multi-disciplinary, and challenging.
Where can our readers go to stay up to date with this research?
Please check out my website: https://giovannipolverino.wordpress.com/ and the following links below. This kind of research does not come from one person and was truly a collaborative effort:
About Dr. Giovanni Polverino
 Dr. Polverino's expertise lies in behavioral ecology, evolutionary biology, and ethorobotics (using robots to study the behavior of animals), working in four different countries, forging strong collaborative links with international researchers and continue to expand his network of collaborators.
Dr. Polverino's expertise lies in behavioral ecology, evolutionary biology, and ethorobotics (using robots to study the behavior of animals), working in four different countries, forging strong collaborative links with international researchers and continue to expand his network of collaborators.
He is a research fellow at both Tuscia University (since Jan 2022) and Monash University (Bob Wong’s lab, since Feb 2022), and an adjunct research fellow at the University of Western Australia (UWA).
Between 2018 and 2021, Dr. Polverino held one of the inaugural Forrest Fellowships from the Forrest Research Foundation, and was based at UWA in the Centre of Evolutionary Biology.
Disclaimer: The views expressed here are those of the interviewee and do not necessarily represent the views of AZoM.com Limited (T/A) AZoNetwork, the owner and operator of this website. This disclaimer forms part of the Terms and Conditions of use of this website.