The researchers at the Computer Science and Artificial Intelligence Laboratory (CSAIL) and the Laboratory for Information and Decision Systems (LIDS) of MIT are working developing algorithms for a new robotic motion-planning system.
The team claims that the new system is capable of more accurate calculation of the motion path in free space. This is an effort to make the robot perform motion similar to what a human being would in everyday tasks like picking up a coffee mug etc. The research team will be presenting the application of the new algorithm on the robotic arm at the Institute of Electrical and Electronics Engineers’ (IEEE) International Conference on Intelligent Robots and Systems, which is scheduled this month.
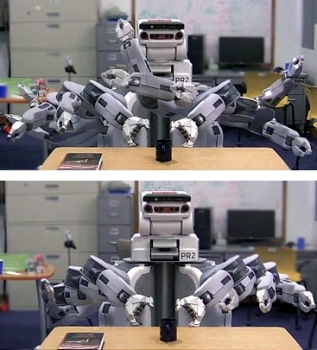 In these time-lapse photos, a robot is guided by two different algorithms as it attempts to grasp a coffee cup on a desk
In these time-lapse photos, a robot is guided by two different algorithms as it attempts to grasp a coffee cup on a desk
The robots that operate with the new algorithm will exhibit more efficient movements in a more predictable fashion, thereby, saving both energy and time. One of the co-researchers of the project explained that robotic arms guided by the algorithm will try to take the most optimal path similar to what a human will take. The calculation of the optimal path is done by evaluating every possible path and eliminating those with collisions and narrowing down on that which is quicker and devoid of obstacles. Similarly the motion-planning algorithm works by picking up on random points in space and comparing it with the earlier ones to decide which is shortest. This random choosing builds paths that are short and collision free. A team from LIDS comprising a graduate student and a professor of aeronautics proposed a twist to the algorithm, which was capable of mapping a set of more efficient motion paths. This modification in the algorithm compares a new point with all the previously visited points within a fixed radius of the new point and then proceeds to zero down on the shortest path.
Another improvement to the algorithm was given by a team from CSAIL, which assumes that each new point is surrounded by a sphere of open space and therefore the points that fall within that sphere are not considered for evaluation. Upon stumbling on collisions the algorithm modifies the area of the spheres accordingly. These improvements to the algorithm helped in arriving at the optimum path quicker than earlier trials using the standard algorithms. Testing of the new algorithm was done on the PR2 robot at CSAIL. A research scientist with Willow Garage mentioned that his team was already evaluating the new algorithm proposed by the MIT researchers.